ストローク別最高速度
(単位はmm/s)
| 200 | 300 | 400 | 730~3835 | |
|---|---|---|---|---|
| X軸 | - | - | - | 2500 |
| Y軸 | 1200 | - | ||
加速度別可搬質量
表内の単位はkgです。
| Y軸ストローク | ||||||
|---|---|---|---|---|---|---|
| 200 | 250 | 300 | 350 | 400 | ||
| 加 速 度 | X軸1.0G Y軸0.3G | 21.2 | 20.0 | 20.0 | 17.4 | 15.2 |
適応コントローラー
各コントローラーのページをご参照ください。(8-8ページ)なお、コントローラーは、別途販売となります。
海外規格

選定上の注意
| (1)型式項目のストローク欄は型式中ではcm(センチメートル)表記となります。 (2)ケーブル長はX軸コネクターボックスから(ケーブルベア仕様の場合はX軸のアクチュエーターケーブルから)コントローラーまでの長さです。標準は3mか5mですが、それ以外の長さもm単位で対応可能です。最長20mまで対応可能です。 (3)定格加速度はX軸が1G、Y軸が0.3Gです。Y軸は1Gまで動作可能ですが、加速度を上げると可搬質量は低下します。 |
寸法図

ICSPA4-B2L1H-CT(ケーブルベア仕様)
ME:メカニカルエンド
SE:ストロークエンド
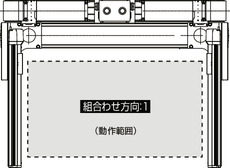
(注) 図面の組合わせ位置が原点位置となります。原点位置を変更する場合は、オプションのNMをご指定ください。また納品後原点位置を変える場合は返却調整が必要ですのでご注意ください。
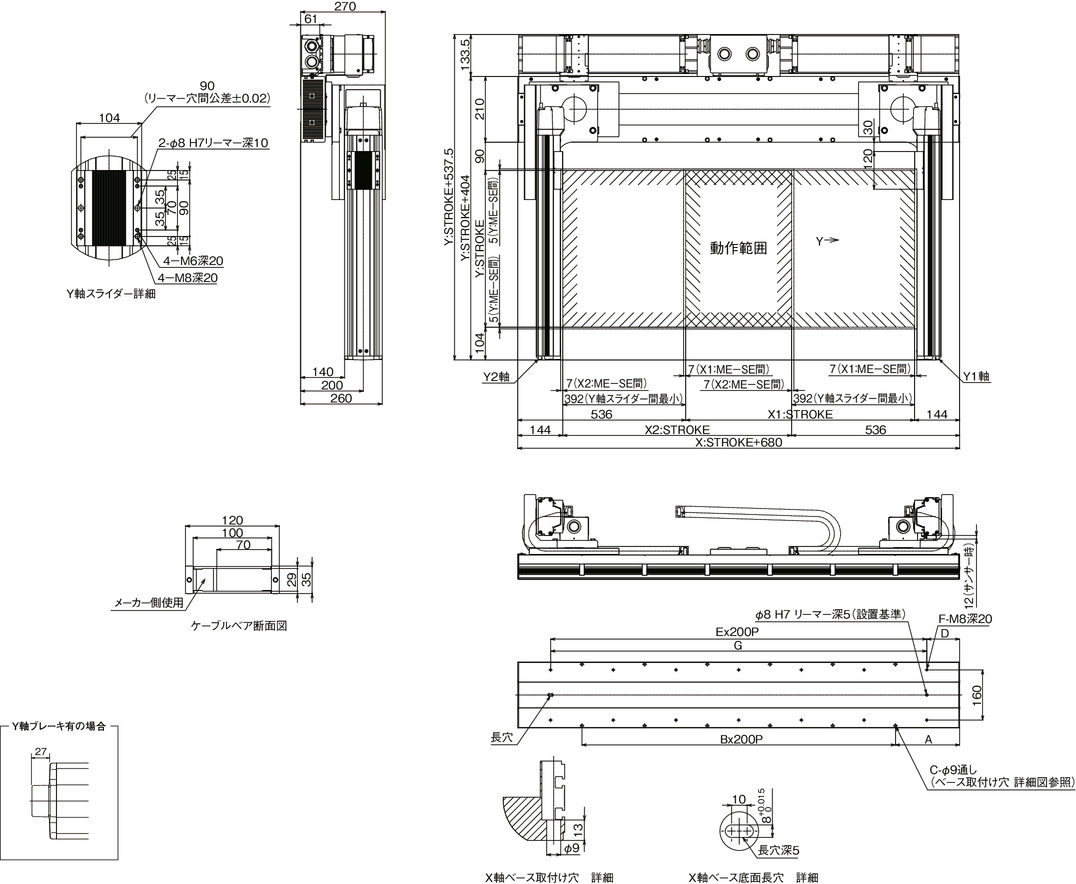
| Xストローク | 730 | 865 | 1000 | 1135 | 1270 | 1405 | 1540 | 1675 | 1810 | 1945 | 2080 | 2215 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 205 | 72.5 | 140 | 207.5 | 75 | 142.5 | 210 | 77.5 | 145 | 212.5 | 80 | 147.5 |
| B | 5 | 7 | 7 | 7 | 9 | 9 | 9 | 11 | 11 | 11 | 13 | 13 |
| C | 12 | 16 | 16 | 16 | 20 | 20 | 20 | 24 | 24 | 24 | 28 | 28 |
| D | 105 | 172.5 | 40 | 107.5 | 175 | 42.5 | 110 | 177.5 | 45 | 112.5 | 180 | 47.5 |
| E | 6 | 6 | 8 | 8 | 8 | 10 | 10 | 10 | 12 | 12 | 12 | 14 |
| F | 14 | 14 | 18 | 18 | 18 | 22 | 22 | 22 | 26 | 26 | 26 | 30 |
| G | 1200 | 1200 | 1600 | 1600 | 1600 | 2000 | 2000 | 2000 | 2400 | 2400 | 2400 | 2800 |
| Xストローク | 2350 | 2485 | 2620 | 2755 | 2890 | 3025 | 3160 | 3295 | 3430 | 3565 | 3700 | 3835 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 215 | 82.5 | 150 | 217.5 | 85 | 152.5 | 220 | 87.5 | 155 | 222.5 | 90 | 157.5 |
| B | 13 | 15 | 15 | 15 | 17 | 17 | 17 | 19 | 19 | 19 | 21 | 21 |
| C | 28 | 32 | 32 | 32 | 36 | 36 | 36 | 40 | 40 | 40 | 44 | 44 |
| D | 115 | 182.5 | 50 | 117.5 | 185 | 52.5 | 120 | 187.5 | 55 | 122.5 | 190 | 57.5 |
| E | 14 | 14 | 16 | 16 | 16 | 18 | 18 | 18 | 20 | 20 | 20 | 22 |
| F | 30 | 30 | 34 | 34 | 34 | 38 | 38 | 38 | 42 | 42 | 42 | 46 |
| G | 2800 | 2800 | 3200 | 3200 | 3200 | 3600 | 3600 | 3600 | 4000 | 4000 | 4000 | 4400 |
共通仕様
| 駆動方式 | X軸:リニアサーボモーター |
| Y軸:ボールねじ 転造C5相当 | |
| 繰返し位置決め精度 | X軸:±0.005mm |
| Y軸:±0.01mm | |
| ロストモーション | 0.02mm以下 |
| ガイド | X軸:リニアガイド |
| Y軸:ベース一体型ガイド | |
| ベース | X軸:材質アルミ 黒色アルマイト処理 |
| Y軸:材質アルミ 白色アルマイト処理 | |
| X軸モーター出力/リード | 400W相当/(なし) |
| Y軸モーター出力/リード | 200W/20mm |
XY組合わせ方向
型式内容
| XY組合わせ 方向(注1) | 型式 |
|---|---|
| 1 | ICSPA4-B2L1H-①-②③-④⑤-T□-⑥-⑦ |
(注1) XY組合わせ方向は下図を参照ください。上記型式の①~⑦の内容は下表をご参照ください。
型式内記号説明
| 番号 | 内容 | 表記 |
|---|---|---|
| ① | エンコーダー種類 | I:インクリメンタル |
| ② | X軸ストローク | 73:730mm ~ 383:3835mm |
| ③ | X軸オプション | オプション表参照 |
| ④ | Y軸ストローク | 20:200mm ~ 40:400mm |
| ⑤ | Y軸オプション | オプション表参照 |
| ⑥ | ケーブル長 | 3L:3m 5L:5m □L:□m |
| ⑦ | Y軸ケーブル配線 | CT:ケーブルベア |
構成軸
| 構成軸 | 型式 | 参照頁 |
|---|---|---|
| X軸 | LSA-W21SM-①-400-②-T□-③-NT1 | 3-733 |
| Y1軸 | ISPA-MYM-①-200-20-④-T□-⑤ | - |
| Y2軸 | ISPA-MYM-①-200-20-④-T□-⑤ | - |
(注) 上記型式の①~⑤は上表の型式内記号をご参照ください。なお、ストロークはmm(ミリメートル)表記となります。
(注) ナット回転型/大型リニアは単軸でもケーブルベアが装着されますが、直交ロボットに組む場合は別のケーブルベアを使用するため、単軸はケーブルベアなし(NT1)の仕様となります。