型式スペック
| 型式 | 軸構成 | アーム長 (mm) | モーター 容量 (W) | 動作範囲 | 繰返し 位置決め 精度 (mm) (注1) | PTP動作時 最大 動作速度 (注2) | 標準 サイクル タイム (s) (注3) | 可搬質量 (kg)(注4) | 第3軸(上下軸) 押付け力制御範囲(N) | 第4軸 許容負荷 | ||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 定格 | 最大 | 上限 (注5) | 下限 (注5) | 許容慣性 モーメント (kg・m2)(注6) | 許容 トルク (N・m) | |||||||||
| IX-NNN7020H-①-T2-② 【IX-NNN7040H-①-T2-②】 | 1軸 | 第1アーム | 350 | 750 | ±125度 | ±0.015 (XY) | 7010mm/s (合成速度) | 0.42 | 5 | 20 | 304.0 | 123.0 | 0.1 | 11.7 |
| 2軸 | 第2アーム | 350 | 400 | ±145度 | ||||||||||
| 3軸 | 上下軸 | - | 400 | 200mm 【400mm】 | ±0.010 | 1614mm/s | ||||||||
| 4軸 | 回転軸 | - | 200 | ±360度 | ±0.005 | 1266度/s | ||||||||
記号説明 ① ケーブル長 ② オプション
アクチュエーター仕様
| 項目 | 内容 |
|---|---|
| エンコーダー種類 | アブソリュート |
| ユーザー配線 | 25芯AWG26シールド付きコネクターD-sub25ピン(ソケット) |
| ユーザー配管 | 外径φ6内径φ4エアチューブ2本(常時使用圧力0.8MPa) 外径φ4内径φ2.5エアチューブ2本(常時使用圧力0.8MPa) |
| アラーム表示灯(注7) | 赤色LED小型表示灯1個(DC24V供給必要) |
| ブレーキ解除スイッチ(注8) | 上下軸落下防止用ブレーキ解除スイッチ(DC24V供給必要) |
| 周囲温度・湿度 | 温度0~40℃ 湿度20~85%RH以下(結露無きこと) |
| 本体質量 | 58kg |
| ケーブル長(注9) | 5L:5m(標準) 10L:10m |
適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
| 名称 | 外観 | 最大接続 可能軸数 | 電源電圧 | 制御方法 | 最大位置決め点数 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ポジショナー | パルス列 | プログラム | ネットワーク ※選択 | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| XSEL-PX4/QX4 |  | 4 | 三相AC200V | - | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 20000 |
| XSEL-RAX4/SAX4 (IX・IXA用) |  | 4 | - | - | ● | ● | ● | - | ● | - | - | - | ● | ● | - | - | - | 36666 (タイプにより異なります) | |
(注) DV、CCなどのネットワーク略称記号については、7-17ページをご確認ください。
海外規格


(注) CEはオプションになります。
選定上の注意
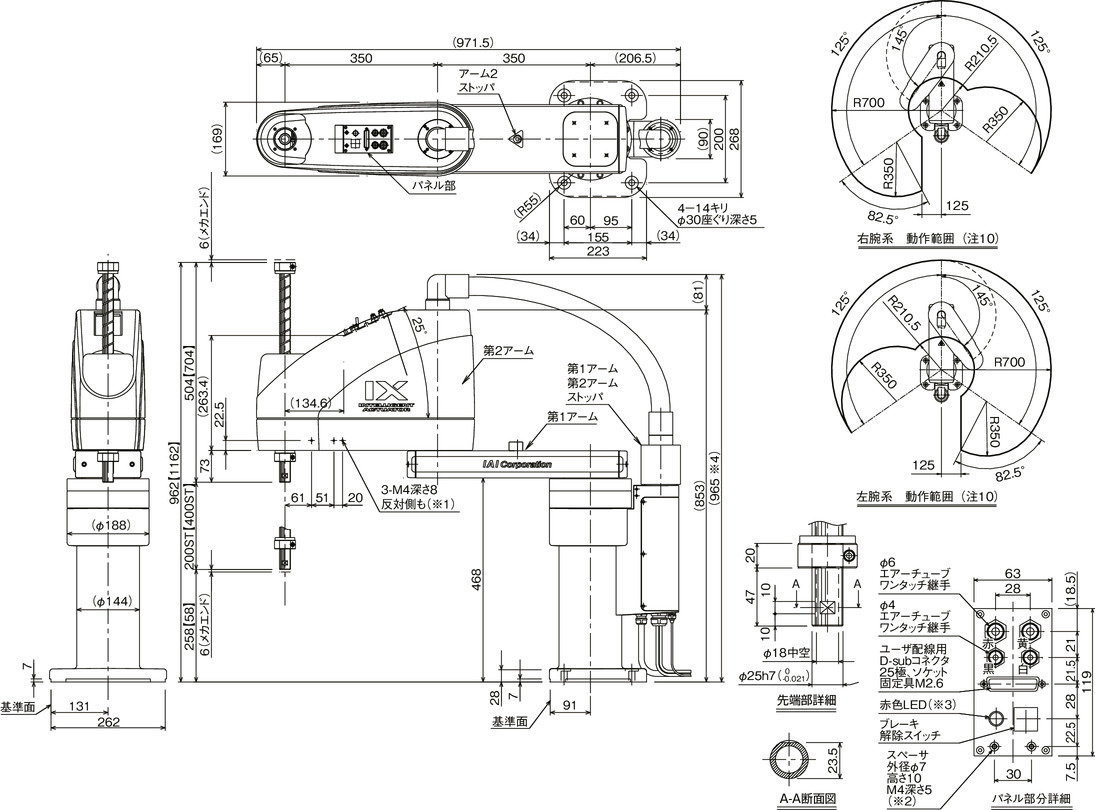
寸法図

※1 3-M4深さ8は下穴がアーム側面を貫通しています。
※2 スペーサーに加わる外力は軸方向30N以下、回転方向2N・m以下としてください。(スペーサー1個あたり)
※3 お客様がコントローラーのI/O出力より信号をとりユーザー配線内にあるLED端子にDC24Vを加える配線処理をすることによりLEDが動作します。
※4 指定ポジションのアクチュエーター姿勢により、高さ寸法が異なります。最大目安値を明記しています。
(注) ケーブル/配管
・モーター・エンコーダーケーブル 5m/10m
・ブレーキ電源ケーブル 5m/10m
・ユーザー配線ケーブル 5m/10m
・エアー配管(4本) 0. 15m