メインスペック
| 項目 | 内容 | ||||||
|---|---|---|---|---|---|---|---|
| リード | ボールねじリード(mm) | 20 | 12 | 6 | 3 | 3(高推力) | |
| 水平 | 可搬質量(注2) | 最大可搬質量(kg)(高出力有効) | 6 | 25 | 40 | 60 | - |
| 最大可搬質量(kg)(高出力無効) | 6 | 25 | 40 | 40 | - | ||
| 速度/加減速度 | 最高速度(mm/s) | 800 | 700 | 450 | 225 | - | |
| 最低速度(mm/s) | 25 | 15 | 8 | 4 | - | ||
| 定格加減速度(G) | 0.5 | 0.3 | 0.3 | 0.3 | - | ||
| 最高加減速度(G) | 1 | 1 | 1 | 1 | - | ||
| 垂直 | 可搬質量 | 最大可搬質量(kg)(高出力有効) | 1.5 | 4 | 10 | 20 | 35 |
| 最大可搬質量(kg)(高出力無効) | 1.5 | 4 | 10 | 20 | 35 | ||
| 速度/加減速度 | 最高速度(mm/s) | 800 | 700 | 450 | 225 | 80 | |
| 最低速度(mm/s) | 25 | 15 | 8 | 4 | 4 | ||
| 定格加減速度(G) | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | ||
| 最高加減速度(G) | 0.5 | 0.5 | 0.5 | 0.5 | 0.5 | ||
| 押付け | 押付け時最大推力(N) | 56 | 93 | 185 | 370 | 750 | |
| 押付け最高速度(mm/s) | 20 | 20 | 20 | 20 | 20 | ||
| ブレーキ | ブレーキ仕様 | 無励磁作動電磁ブレーキ | |||||
| ブレーキ保持力(kgf) | 1.5 | 4 | 10 | 20 | 35 | ||
| ストローク | 最小ストローク(mm) | 50 | 50 | 50 | 50 | 50 | |
| 最大ストローク(mm) | 400 | 400 | 400 | 400 | 400 | ||
| ストロークピッチ(mm) | 50 | 50 | 50 | 50 | 50 | ||
(注2) ラジアル荷重を外付けガイドで受けた場合です。
| 項目 | 内容 |
|---|---|
| 駆動方式 | ボールねじ φ10mm 転造C10 |
| 繰返し位置決め精度 | リード20:±0.03mm リード12/6/3:±0.02mm |
| ロストモーション | 0.1mm以下 |
| ロッド | φ22mm 材質:ステンレス |
| ロッド不回転精度 | 0度 |
| 使用周囲温度・湿度 | 0~40℃、85%RH以下(結露なきこと) |
| 保護等級 | IP30 |
| 耐振動・耐衝撃 | 4.9m/s2 |
| 海外対応規格 | CEマーク、RoHS指令 |
| モーター種類 | パルスモーター |
| エンコーダー種類 | インクリメンタル |
| エンコーダーパルス数 | 800 pulse/rev |
| 納期 | ホームページ[納期照会]に記載 |
ストロークと最高速度
(単位はmm/s)
| リード (mm) |
ストローク コントローラー | 50~400(50mmごと) |
|---|---|---|
| 20 | 高出力有効 | 800 |
| 高出力無効 | 640 | |
| 12 | 高出力有効 | 700 |
| 高出力無効 | 500 | |
| 6 | 高出力有効 | 450 |
| 高出力無効 | 250 | |
| 3 (標準仕様) | 高出力有効 | 225 |
| 高出力無効 | 125 | |
| 3 (高推力仕様) (注3) | 高出力有効 | 80 |
(注3) 高推力仕様は高出力設定でのみ動作可能です。
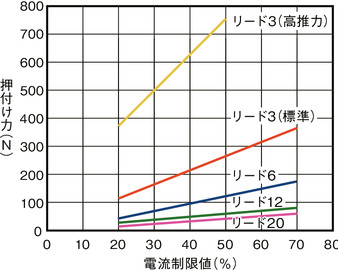
押付け力と電流制限値の相関図
速度・加速度別可搬質量表 ※出荷時は高出力設定有効です。詳細は1-23ページをご参照ください。
高出力設定有効(パワーモード) 搬送質量により最高速度は変動します。可搬質量の単位はkgです。空欄は動作不可となります。
| 姿勢 | 水平 | 垂 直 | ||||||
|---|---|---|---|---|---|---|---|---|
| 速度 | 加速度(G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 6 | 6 | 6 | 5 | 5 | 1.5 | 1.5 | 1.5 |
| 160 | 6 | 6 | 6 | 5 | 5 | 1.5 | 1.5 | 1.5 |
| 320 | 6 | 6 | 6 | 5 | 3 | 1.5 | 1.5 | 1.5 |
| 480 | 6 | 6 | 6 | 5 | 3 | 1.5 | 1.5 | 1.5 |
| 640 | 6 | 4 | 3 | 2 | 1.5 | 1.5 | ||
| 800 | 4 | 3 | 1 | 1 | ||||
| 姿勢 | 水平 | 垂直 | ||||||
|---|---|---|---|---|---|---|---|---|
| 速度 | 加速度(G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 25 | 25 | 18 | 16 | 12 | 4 | 4 | 4 |
| 100 | 25 | 25 | 18 | 16 | 12 | 4 | 4 | 4 |
| 200 | 25 | 25 | 18 | 16 | 10 | 4 | 4 | 4 |
| 300 | 25 | 25 | 18 | 12 | 8 | 4 | 4 | 4 |
| 400 | 20 | 20 | 14 | 10 | 6 | 4 | 4 | 4 |
| 500 | 15 | 15 | 8 | 6 | 4 | 4 | 3.5 | 3 |
| 600 | 10 | 10 | 6 | 3 | 2 | 4 | 3 | 2 |
| 700 | 6 | 2 | 2 | 1 | ||||
| 姿勢 | 水平 | 垂直 | ||||||
|---|---|---|---|---|---|---|---|---|
| 速度 | 加速度(G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 40 | 40 | 35 | 30 | 25 | 10 | 10 | 10 |
| 50 | 40 | 40 | 35 | 30 | 25 | 10 | 10 | 10 |
| 100 | 40 | 40 | 35 | 30 | 25 | 10 | 10 | 10 |
| 150 | 40 | 40 | 35 | 25 | 25 | 10 | 10 | 10 |
| 200 | 40 | 40 | 30 | 25 | 20 | 10 | 10 | 10 |
| 250 | 40 | 40 | 27.5 | 22.5 | 18 | 10 | 9 | 8 |
| 300 | 40 | 35 | 25 | 20 | 14 | 6 | 6 | 6 |
| 350 | 40 | 30 | 14 | 12 | 10 | 5 | 5 | 5 |
| 400 | 30 | 18 | 10 | 6 | 5 | 4 | 3 | 3 |
| 450 | 25 | 8 | 3 | 2 | 2 | 1 | ||
| 姿勢 | 水平 | 垂直 | ||||||
|---|---|---|---|---|---|---|---|---|
| 速度 | 加速度(G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 60 | 60 | 50 | 45 | 40 | 20 | 20 | 20 |
| 25 | 60 | 60 | 50 | 45 | 40 | 20 | 20 | 20 |
| 50 | 60 | 60 | 50 | 45 | 40 | 20 | 20 | 20 |
| 75 | 60 | 60 | 50 | 45 | 40 | 20 | 20 | 20 |
| 100 | 60 | 60 | 50 | 45 | 40 | 20 | 20 | 20 |
| 125 | 60 | 60 | 50 | 40 | 30 | 18 | 14 | 10 |
| 150 | 60 | 50 | 40 | 30 | 25 | 14 | 10 | 6 |
| 175 | 60 | 40 | 35 | 25 | 20 | 12 | 6 | 5 |
| 200 | 60 | 35 | 30 | 20 | 14 | 8 | 5 | 4.5 |
| 225 | 40 | 16 | 16 | 10 | 6 | 5 | 5 | 4 |
| 姿勢 | 垂直 | ||
|---|---|---|---|
| 速度 | 加速度(G) | ||
| (mm/s) | 0.1 | 0.3 | 0.5 |
| 0 | 35 | 35 | 35 |
| 40 | 35 | 35 | 35 |
| 50 | 30 | 30 | 30 |
| 80 | 15 | 15 | 15 |
高出力設定無効(省エネモード) 搬送質量により最高速度は変動します。可搬質量の単位はkgです。
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 | 加速度(G) | |
| (mm/s) | 0.3 | 0.2 |
| 0 | 6 | 1.5 |
| 160 | 6 | 1.5 |
| 320 | 6 | 1.5 |
| 480 | 4 | 1 |
| 640 | 3 | 0.5 |
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 | 加速度(G) | |
| (mm/s) | 0.2 | 0.2 |
| 0 | 25 | 4 |
| 100 | 25 | 4 |
| 200 | 25 | 4 |
| 300 | 20 | 3 |
| 400 | 10 | 2 |
| 500 | 5 | 1 |
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 | 加速度(G) | |
| (mm/s) | 0.2 | 0.2 |
| 0 | 40 | 10 |
| 50 | 40 | 10 |
| 100 | 40 | 10 |
| 150 | 40 | 8 |
| 200 | 35 | 5 |
| 250 | 10 | 3 |
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 | 加速度(G) | |
| (mm/s) | 0.2 | 0.2 |
| 0 | 40 | 20 |
| 25 | 40 | 20 |
| 50 | 40 | 16 |
| 75 | 40 | 12 |
| 100 | 40 | 9 |
| 125 | 40 | 5 |
| 姿勢 | 垂直 | |
|---|---|---|
| 速度 | 加速度(G) | |
| (mm/s) | 0.1 | 0.2 |
| 0 | 35 | |
| 30 | 35 | |
| 40 | 20 | |
| 50 | 15 | |
| 80 | 5 | |
適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
| 名称 | 外観 | 最大接続 可能軸数 | 電源電圧 | 制御方法 | 最大位置決め点数 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ポジショナー | パルス列 | プログラム | ネットワーク ※選択 | |||||||||||||||||
| DV | CC | CIE | CIT | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MSEL-PC/PG |  | 4 | 単相AC 100~230V | - | - | ● | ● | ● | - | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● ※選択 | ● ※選択 | - | ● | ● | ● | - | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (ネットワーク仕様は768) |
| PCON-CYB/PLB/POB |  | 1 | ● ※選択 | ● ※選択 | - | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 (ML3,SSN,ECMは8) | - | - | - | ● | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3,SSN,ECMはポジションデータなし) | |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
(注) DV、CCなどのネットワーク略称記号については、8-15ページをご確認ください。
海外規格


選定上の注意
| (1)「メインスペック」の可搬質量は、最大値を表示しています。詳細は「速度・加速度別可搬質量表」をご参照ください。 (2)水平可搬質量は全て外付けガイドを併用した場合の数値です。 (3)押付け動作を行う場合は「押付け力と電流制限値の相関図」をご参照ください。押付け力は目安の値です。注意点は1-321ページをご確認ください。 (4)垂直、天吊り姿勢によっては注意が必要です。詳細は1-313ページをご参照ください。 (5)ラジアルシリンダーはガイドを内蔵しています。許容可能な負荷質量については「ロッド先端許容負荷質量」をご参照ください。 (6)簡易アブソで使用される場合も型式項目のエンコーダー種類欄は「 I 」になります。 (7)RCON/RSEL接続時は、変換ケーブルが別途必要になります。詳細は8-101ページをご参照ください。 |
寸法図

ST:ストローク
M.E.:メカニカルエンド
S.E.:ストロークエンド
(注) ケーブルジョイントコネクターには、モーター・エンコーダーケーブルを接続します。
(注) 原点復帰時はロッドがM.E.まで移動しますので、周囲物との干渉にご注意ください。また高推力仕様は原点―M.E.間、S.E.―M.E.間の寸法が2になりますのでご注意ください。
(注) 取付けボルト長にご注意ください。ベース裏面の取付けねじを使用する場合、ボルトが長いと内部部品に干渉し、摺動異常や部品破損の可能性があります。
(注) 二面幅の面の向きは製品により異なります。また、二面幅の向きは変更できません。
(注) フロントハウジングおよびフランジを使用して本体を取付ける場合は、本体部に外力がかからないようにしてください。

ストローク別寸法
| ストローク | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | |
|---|---|---|---|---|---|---|---|---|---|
| L | ブレーキ無し | 258.5 | 308.5 | 358.5 | 408.5 | 458.5 | 508.5 | 558.5 | 608.5 |
| ブレーキ有り | 298.5 | 348.5 | 398.5 | 448.5 | 498.5 | 548.5 | 598.5 | 648.5 | |
| 高推力仕様 | 319.5 | 369.5 | 419.5 | 469.5 | 519.5 | 569.5 | 619.5 | 669.5 | |
| A | 153.5 | 203.5 | 253.5 | 303.5 | 353.5 | 403.5 | 453.5 | 503.5 | |
| B | 127 | 177 | 227 | 277 | 327 | 377 | 427 | 477 | |
| C | 73.5 | 123.5 | 73.5 | 123.5 | 73.5 | 123.5 | 73.5 | 123.5 | |
| D | 0 | 0 | 1 | 1 | 2 | 2 | 3 | 3 | |
| E | 4 | 4 | 6 | 6 | 8 | 8 | 10 | 10 | |
| F | 35 | 85 | 135 | 85 | 135 | 85 | 135 | 85 | |
| G | 0 | 0 | 0 | 1 | 1 | 2 | 2 | 3 | |
| H | 4 | 4 | 4 | 6 | 6 | 8 | 8 | 10 | |
| J | 18.5 | 68.5 | 118.5 | 168.5 | 218.5 | 268.5 | 318.5 | 368.5 | |
| K | 73.5 | 123.5 | 173.5 | 223.5 | 273.5 | 323.5 | 373.5 | 423.5 | |
| ロッド先端静的許容荷重(N) | 66 | 51 | 42 | 35 | 30 | 26 | 22 | 20 | |
| ロッド先端動的許容荷重(5000km寿命)(N) | オフセット0mm | 32.4 | 23.6 | 18.1 | 14.4 | 11.6 | 9.5 | 7.7 | 6.2 |
| オフセット100mm | 25.6 | 19.7 | 15.7 | 12.7 | 10.4 | 8.6 | 7.1 | 5.7 | |
| ロッド先端静的許容トルク(N・m) | 6.6 | 5.2 | 4.3 | 3.7 | 3.2 | 2.8 | 2.6 | 2.3 | |
| ロッド先端動的許容トルク(N・m) | 2.6 | 2.0 | 1.6 | 1.3 | 1.0 | 0.9 | 0.7 | 0.6 | |
ストローク別質量
| ストローク | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | |
|---|---|---|---|---|---|---|---|---|---|
| 質量 (kg) | ブレーキ無し | 1.9 | 2.1 | 2.4 | 2.7 | 2.9 | 3.2 | 3.4 | 3.7 |
| ブレーキ有り | 2.1 | 2.4 | 2.6 | 2.9 | 3.1 | 3.4 | 3.7 | 3.9 | |
| 高推力仕様 | 2.3 | 2.6 | 2.8 | 3.1 | 3.3 | 3.6 | 3.9 | 4.1 | |
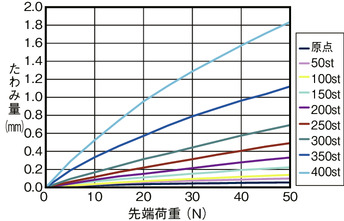
ロッドたわみ量(参考値)
下表はアクチュエーターを垂直に設置してロッドに片方から力をかけた場合のたわみ量です。
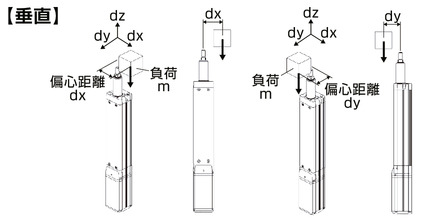
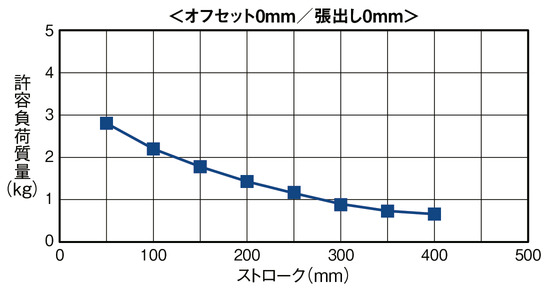
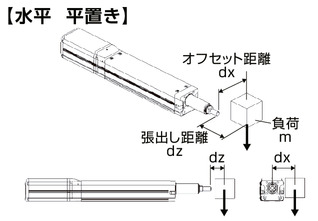
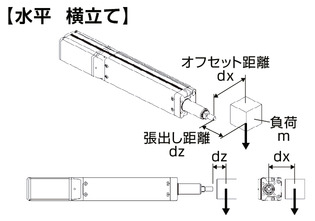
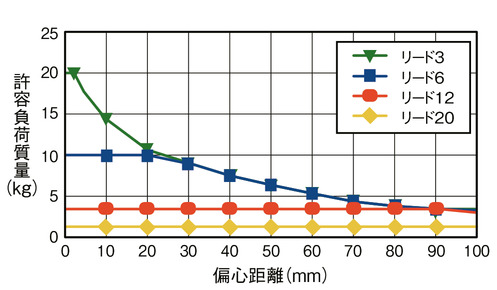
ロッド先端許容負荷質量
水平
許容負荷質量の算出の条件
加減速によるモーメントを考慮した、
ガイド走行寿命5000kmとなる負荷質量。
(加速度1G、速度500mm/s)
垂直
許容負荷質量の算出の条件
加減速によるモーメントを考慮した、
ガイド走行寿命5000kmとなる負荷質量。
(加速度0.5G、速度500mm/s)