メインスペック
| 項目 | 内容 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| モーター | 出力(W) | 60W | 100W | 150W | |||||||
| リード | ボールねじリード(mm) | 16 | 8 | 4 | 16 | 8 | 4 | 16 | 8 | 4 | |
| 水平 | 可搬質量 | 最大可搬質量(kg) | 5 | 10 | 20 | 10 | 22 | 40 | 15 | 35 | 55 |
| 速度/加減速度 | 最高速度(mm/s) | 800 | 400 | 200 | 800 | 400 | 200 | 800 | 400 | 200 | |
| 定格加減速度(G) | 0.25 | 0.15 | 0.05 | 0.3 | 0.2 | 0.1 | 0.3 | 0.2 | 0.1 | ||
| 最高加減速度(G) | 0.35 | 0.25 | 0.15 | 0.4 | 0.3 | 0.2 | 0.4 | 0.3 | 0.2 | ||
| 垂直 | 可搬質量 | 最大可搬質量(kg) | 2 | 5 | 10 | 3.5 | 9 | 19.5 | 6.5 | 14.5 | 22.5 |
| 速度/加減速度 | 最高速度(mm/s) | 800 | 400 | 200 | 800 | 400 | 200 | 800 | 400 | 200 | |
| 定格加減速度(G) | 0.25 | 0.15 | 0.05 | 0.3 | 0.2 | 0.1 | 0.3 | 0.2 | 0.1 | ||
| 最高加減速度(G) | 0.35 | 0.25 | 0.15 | 0.4 | 0.3 | 0.2 | 0.4 | 0.3 | 0.2 | ||
| 推力 | 定格推力(N) | 63.4 | 126.8 | 253.7 | 103.5 | 207.0 | 413.9 | 156.9 | 313.8 | 627.5 | |
| ブレーキ | ブレーキ仕様 | 無励磁作動電磁ブレーキ | |||||||||
| ブレーキ保持力(kgf) | 2 | 5 | 10 | 3.5 | 9 | 19.5 | 6.5 | 14.5 | 22.5 | ||
| ストローク | 最小ストローク(mm) | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | |
| 最大ストローク(mm) | 300 | 300 | 300 | 300 | 300 | 300 | 300 | 300 | 300 | ||
| ストロークピッチ(mm) | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | 50 | ||
| 項目 | 内容 |
|---|---|
| 駆動方式 | ボールねじ φ12mm 転造C10 |
| 繰返し位置決め精度 | ±0.02mm |
| ロストモーション | 0.1mm以下 |
| ロッド | φ35mm 材質:アルミ 白色アルマイト処理 |
| 使用周囲温度・湿度 | 0~40℃、85%RH以下(結露なきこと) |
| 保護等級 | IP30 |
| 耐振動・耐衝撃 | 4.9m/s2 |
| 海外対応規格 | RoHS指令 |
| モーター種類 | ACサーボモーター |
| エンコーダー種類 | インクリメンタル |
| エンコーダーパルス数 | 3072 pulse/rev |
| 納期 | ホームページ[納期照会]に記載 |
ストロークと最高速度
(単位はmm/s)
|
ストローク リード | 50~300 (50mmごと) |
|---|---|
| 16 | 800 |
| 8 | 400 |
| 4 | 200 |
適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
| 名称 | 外観 | 最大接続 可能軸数 | 電源電圧 | 制御方法 | 最大位置決め点数 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ポジショナー | パルス列 | プログラム | ネットワーク ※選択 | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| RCON |  | 16 (ML3,SSN,ECMは8) | DC24V 単相AC200V 三相AC200V | - | - | - | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3,SSN,ECMはポジションデータなし) |
| RSEL |  | 8 | - | - | ● | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
| SCON-CB/CGB |  | 1 | 単相AC 100V/200V | ● | ● | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | ● | 512 (ネットワーク仕様は768) |
| SCON2-CG |  | 1 | 単相AC100V | ● | ● | - | ● | ● | ● | - | - | - | ● | ● | ● | ● | - | - | 384 |
| SCON2-CG |  | 1 | 単相AC200V | ● | ● | - | ● | ● | ● | - | - | - | ● | ● | ● | ● | - | - | 384 |
| SSEL-CS |  | 2 | 単相AC 100V/200V | ● | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 20000 |
| XSEL-P/Q |  | 6 | 単相AC200V 三相AC200V | - | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 20000 |
(注) DV、CCなどのネットワーク略称記号については、8-15ページをご確認ください。
(注) XSEL-P/Qの5、6軸目は接続できません。
(注) SCON2のML3とECは、コントローラー型式の機能オプションなしの場合はリモートI/O仕様となり、機能オプションに「M」が選択された場合はモーションネットワーク仕様となります。
海外規格

選定上の注意
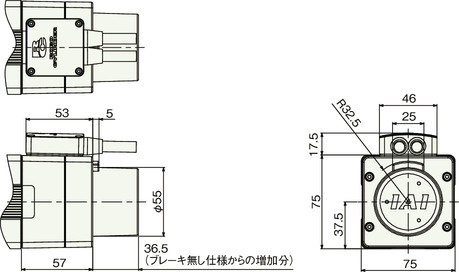
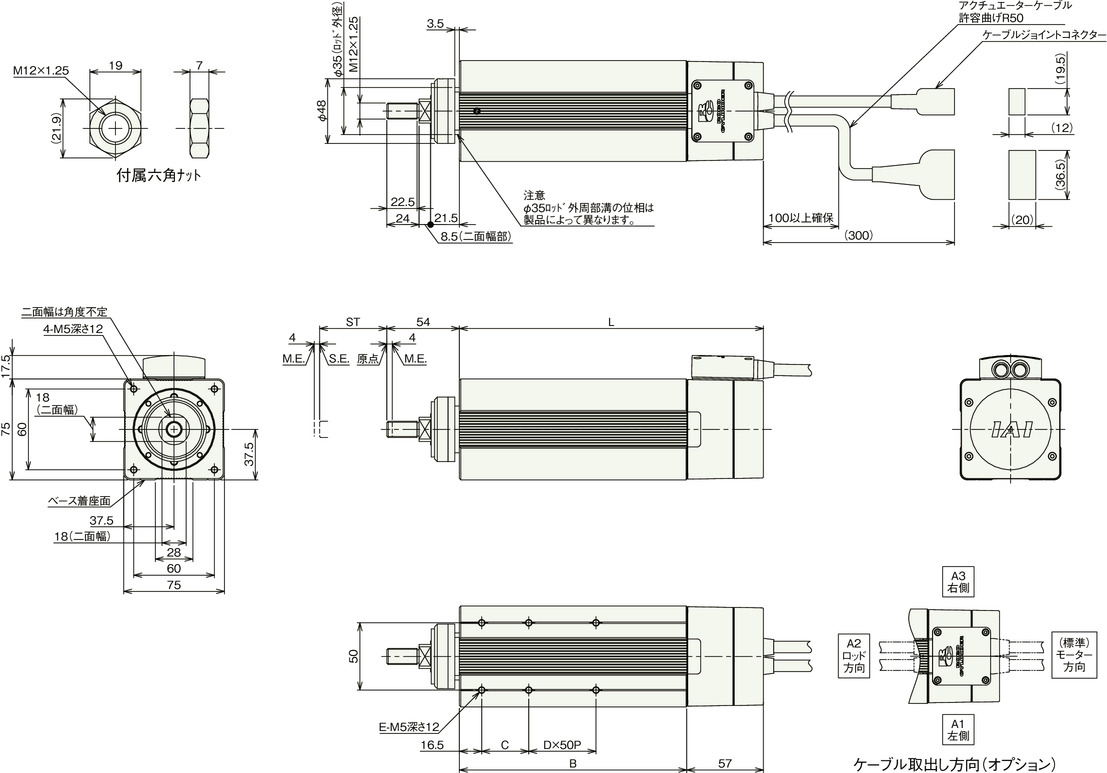
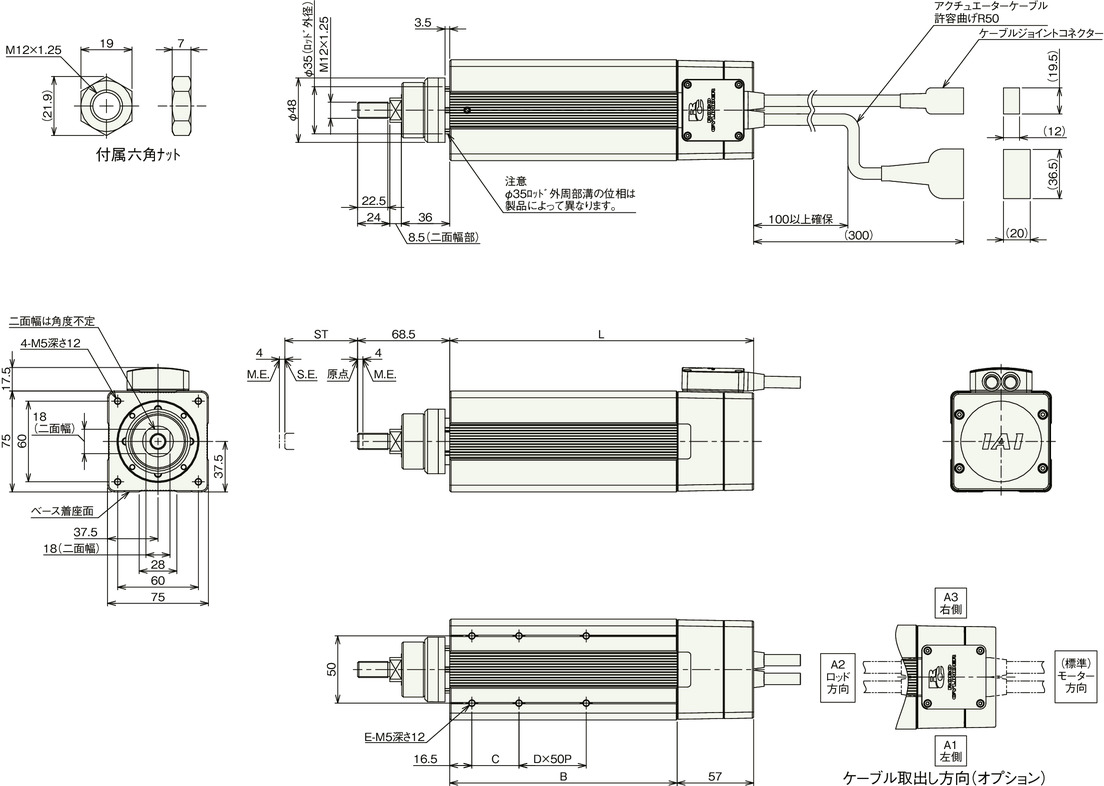
寸法図

標準仕様
ST:ストローク
M.E.:メカニカルエンド
S.E.:ストロークエンド
(注) ケーブルジョイントコネクターには、モーター・エンコーダーケーブルを接続します。ケーブルの詳細は4-607ページをご参照ください。
(注) 原点復帰時はロッドがM.E.まで移動しますので、周囲物との干渉にご注意ください。
(注) 二面幅の面の向きは製品により異なりますのでご注意ください。
(注) ロッドにはロッドの進行方向以外からの外力をかけないでください。ロッドに対して直角方向や回転方向の力がかかるとまわり止めが破損する場合があります。
(注) 前進・後退作業による息継ぎ防止のため、本体側面にスリットが設けられています。そこから粉塵が本体内部に入る恐れがありますので、粉塵の多い環境での使用はご注意ください。
ストローク別寸法
| ストローク | 50 | 100 | 150 | 200 | 250 | 300 | |
|---|---|---|---|---|---|---|---|
| L | 60W | 126 | 176 | 226 | 276 | 326 | 376 |
| 100W | 133 | 176 | 226 | 276 | 326 | 376 | |
| 150W | 145 | 176 | 226 | 276 | 326 | 376 | |
| B | 60W | 69 | 119 | 169 | 219 | 269 | 319 |
| 100W | 76 | 119 | 169 | 219 | 269 | 319 | |
| 150W | 88 | 119 | 169 | 219 | 269 | 319 | |
| C | 25 | 35 | 35 | 35 | 35 | 35 | |
| D | 0 | 0 | 1 | 2 | 3 | 4 | |
| E | 4 | 4 | 6 | 8 | 10 | 12 | |
ストローク別寸法
| ストローク | 50 | 100 | 150 | 200 | 250 | 300 | |
|---|---|---|---|---|---|---|---|
| L | 60W | 126 | 176 | 226 | 276 | 326 | 376 |
| 100W | 133 | 176 | 226 | 276 | 326 | 376 | |
| 150W | 145 | 176 | 226 | 276 | 326 | 376 | |
| B | 60W | 69 | 119 | 169 | 219 | 269 | 319 |
| 100W | 76 | 119 | 169 | 219 | 269 | 319 | |
| 150W | 88 | 119 | 169 | 219 | 269 | 319 | |
| C | 25 | 35 | 35 | 35 | 35 | 35 | |
| D | 0 | 0 | 1 | 2 | 3 | 4 | |
| E | 4 | 4 | 6 | 8 | 10 | 12 | |
ロッド先端延長仕様
ST:ストローク
M.E.:メカニカルエンド
S.E.:ストロークエンド
(注) ケーブルジョイントコネクターには、モーター・エンコーダーケーブルを接続します。ケーブルの詳細は4-607ページをご参照ください。
(注) 原点復帰時はロッドがM.E.まで移動しますので、周囲物との干渉にご注意ください。
(注) 二面幅の面の向きは製品により異なりますのでご注意ください。
(注) ロッドにはロッドの進行方向以外からの外力をかけないでください。ロッドに対して直角方向や回転方向の力がかかるとまわり止めが破損する場合があります。
(注) 前進・後退作業による息継ぎ防止のため、本体側面にスリットが設けられています。そこから粉塵が本体内部に入る恐れがありますので、粉塵の多い環境での使用はご注意ください。
ストローク別質量
| ストローク | 50 | 100 | 150 | 200 | 250 | 300 | |
|---|---|---|---|---|---|---|---|
| 質量 (kg) | ブレーキ無し(60W) | 2.4 | 2.9 | 3.5 | 4.1 | 4.6 | 5.2 |
| ブレーキ無し(100W) | 2.6 | 3.1 | 3.7 | 4.2 | 4.8 | 5.4 | |
| ブレーキ無し(150W) | 2.9 | 3.3 | 3.9 | 4.4 | 5 | 5.6 | |
| ブレーキ有り(60W) | 2.7 | 3.2 | 3.8 | 4.4 | 4.9 | 5.5 | |
| ブレーキ有り(100W) | 2.9 | 3.4 | 4 | 4.5 | 5.1 | 5.7 | |
| ブレーキ有り(150W) | 3.2 | 3.6 | 4.2 | 4.7 | 5.3 | 5.9 | |
ストローク別質量
| ストローク | 50 | 100 | 150 | 200 | 250 | 300 | |
|---|---|---|---|---|---|---|---|
| 質量 (kg) | ブレーキ無し(60W) | 2.4 | 2.9 | 3.5 | 4.1 | 4.6 | 5.2 |
| ブレーキ無し(100W) | 2.6 | 3.1 | 3.7 | 4.2 | 4.8 | 5.4 | |
| ブレーキ無し(150W) | 2.9 | 3.3 | 3.9 | 4.4 | 5 | 5.6 | |
| ブレーキ有り(60W) | 2.7 | 3.2 | 3.8 | 4.4 | 4.9 | 5.5 | |
| ブレーキ有り(100W) | 2.9 | 3.4 | 4 | 4.5 | 5.1 | 5.7 | |
| ブレーキ有り(150W) | 3.2 | 3.6 | 4.2 | 4.7 | 5.3 | 5.9 | |
ブレーキ有り