加速度別可搬質量
表内の単位はkgです。
MMタイプ:X中速・Y中速
|
Y軸ストローク(mm) 加減速度(G) | 50~300 (50mmごと) | 350 | 400 |
|---|---|---|---|
| 0.1 | 5 | 3 | 2 |
| 0.3 | 3 | - | - |
適応コントローラー
コントローラーは、別途販売となります。各コントローラーページをご参照ください。
海外規格

選定上の注意
| (1)基本的に組立てた形での出荷になります。 ばらし出荷をご希望の場合は、営業担当までご相談ください。 (2)「加速度別可搬質量」はX軸、Y軸、Z軸、R軸共に同じ加減速度の場合です。 著しい振動が生じる場合、適宜、速度・加減速度を落として使用してください。 |
寸法図

※1 ケーブルキャリアが膨らみ、記載寸法より若干大きくなる可能性があります。
(注) 図面の組合わせ位置が原点となります。
(注) 第1配線・第2配線ともケーブルキャリア付きの場合の図面です。
(注) ケーブルキャリアの詳細は5-567ページをご覧ください。
(注) X軸ケーブルキャリアガイドレールはお客様にてX軸を設置する面に固定してください。
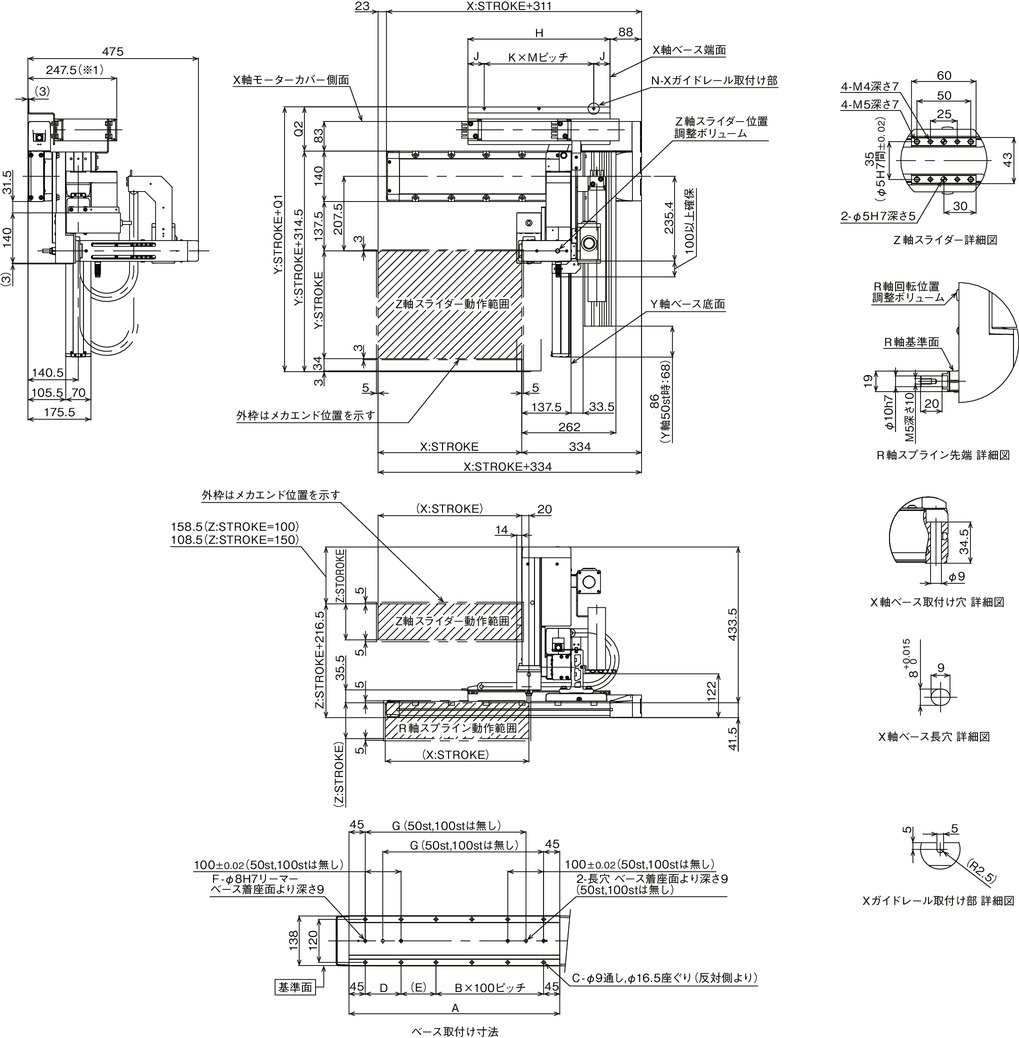
ストローク別寸法
| X:ストローク | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | 650 | 700 | 750 | 800 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 237 | 287 | 337 | 387 | 437 | 487 | 537 | 587 | 637 | 687 | 737 | 787 | 837 | 887 | 937 | 987 |
| B | 0 | 0 | 1 | 1 | 2 | 2 | 3 | 3 | 4 | 4 | 5 | 5 | 6 | 6 | 7 | 7 |
| C | 4 | 4 | 8 | 8 | 10 | 10 | 12 | 12 | 14 | 14 | 16 | 16 | 18 | 18 | 20 | 20 |
| D | - | - | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| E | 147 | 197 | 47 | 97 | 47 | 97 | 47 | 97 | 47 | 97 | 47 | 97 | 47 | 97 | 47 | 97 |
| F | 2 | 2 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 | 4 |
| G | - | - | 198 | 248 | 298 | 348 | 398 | 448 | 498 | 548 | 598 | 648 | 698 | 748 | 798 | 848 |
| H | 221 | 246 | 271 | 296 | 321 | 346 | 371 | 396 | 421 | 446 | 471 | 496 | 521 | 546 | 571 | 596 |
| J | 45.5 | 45.5 | 45.5 | 45.5 | 45.5 | 45.5 | 45.5 | 45.5 | 45.5 | 43 | 48 | 45.5 | 43 | 43 | 45.5 | 43 |
| K | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 3 | 3 | 3 | 3 | 3 | 4 | 4 | 4 |
| M | 130 | 155 | 90 | 102.5 | 115 | 127.5 | 140 | 152.5 | 110 | 120 | 125 | 135 | 145 | 115 | 120 | 127.5 |
| N | 2 | 2 | 3 | 3 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 | 4 | 5 | 5 | 5 |
ストローク別寸法
| ケーブルキャリアサイズ | CT | CTM | CTL | CTXL |
|---|---|---|---|---|
| Q1 | 425 | 438 | 451 | 468 |
| Q2 | 110.5 | 123.5 | 136.5 | 153.5 |
(注) ケーブルキャリアのサイズにより、Q1、Q2の寸法が変わります。
スペック
| 項目 | X軸 | Y軸 | Z軸 | R軸 |
|---|---|---|---|---|
| 構成軸 | RCP6-WSA14R | RCP6-SA7R | TTPIK-AZR | |
| ストローク | 50~800mm (50mmごと) | 50~400mm (50mmごと) | 100、150mm | 180度、360度 |
| 最高速度(注2、3) | 210mm/s | 280mm/s | 400mm/s | 1000度/s |
| 許容負荷慣性モーメント(注3) | - | 0.01kg・m2 | ||
| モーターサイズ | 56□ パルスモーター | 56□ パルスモーター | 42□ パルスモーター | 42□ パルスモーター |
| ボールねじリード | 8mm | 8mm | 12mm | - |
| 駆動方式 | ボールねじ φ12mm 転造C10 | ボールねじ φ12mm 転造C10 | ボールねじ φ10mm 転造C10 | - |
| 繰返し位置決め精度 | ±0.01mm | ±0.01度 | ||
| ベース素材 | アルミ | |||
| 使用周囲温度・湿度 | 0 ~40℃、 85% RH 以下(結露無きこと) | |||
(注2) 移動距離が短い場合や加速度が低い場合は最高速度に到達しない場合があります。ストロークにより最高速度が変化する場合があります。詳細は、5-569ページのストローク別最高速度をご参照ください。
(注3) R軸は負荷慣性モーメントにより、角速度・加減速度が異なります。詳細は、5-569ページをご確認ください。