






アクチュエータースペック
| 型式 | モーター出力 (W) | リード (mm) | 最大可搬質量 | 定格推力 (N) | ストローク (mm) | |
|---|---|---|---|---|---|---|
| 水平(kg) | 垂直(kg) | |||||
| RCA-RA3D-I-20-10-①-②-③-④ | 20 | 10 | 4.0 | 1.5 | 36.2 | 50~200 (50mm毎) |
| RCA-RA3D-I-20-5-①-②-③-④ | 5 | 9.0 | 3.0 | 72.4 | ||
| RCA-RA3D-I-20-2.5-①-②-③-④ | 2.5 | 18.0 | 6.5 | 144.8 | ||
記号説明 ① ストローク ② 適応コントローラー ③ ケーブル長 ④ オプション
|
ストローク リード | 50~200 (50mm毎) |
|---|---|
| 10 | 500 |
| 5 | 250 |
| 2.5 | 125 |
(単位はmm/s)
アクチュエーター仕様
| 項目 | 内容 |
|---|---|
| 駆動方式 | ボールねじ φ8mm 転造C10 |
| 繰返し位置決め精度 | ±0.02mm |
| ロストモーション | 0.1mm以下 |
| ロッド径 | φ16mm |
| ロッド不回転精度 | ±1.0度 |
| 使用周囲温度・湿度 | 0~40℃、 85%RH以下(結露無きこと) |
適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
| 名称 | 外観 | 最大接続 可能軸数 | 電源電圧 | 制御方法 | 最大位置決め点数 | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ポジショナー | パルス列 | プログラム | ネットワーク ※選択 | ||||||||||||||||
| DV | CC | CIE | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| ACON-CB/CGB |  | 1 | DC24V | ● ※選択 | ● ※選択 | - | ● | ● | ● | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (ネットワーク仕様は768) |
| ACON-CYB/PLB/POB |  | 1 | ● ※選択 | ● ※選択 | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| ASEL-CS |  | 2 | ● | - | ● | ● | ● | - | ● | - | - | - | - | ● | - | - | - | 1500 | |
| MCON-C/CG |  | 8 | - | - | - | ● | ● | ● | ● | ● | - | ● | ● | ● | ● | ● | ● | 256 | |
| MCON-LC/LCG |  | 6 | - | - | ● | ● | ● | - | ● | ● | - | - | ● | ● | ● | - | - | 256 | |
| RCON |  | 16 | - | - | - | ● | ● | ● | ● | - | - | - | ● | ● | ● | - | - | 128 | |
(注) DV、CCなどのネットワーク略称記号については、7-17ページをご確認ください。
海外規格


特徴
選定上の注意
| (1)可搬質量は加速度0.3G(リード2.5は0.2G)で動作させた時の値で、加速度の上限となります。 (2)動作条件(搬送質量、加減速度等)によって、使用可能なデューティーの目安は変化します。詳細は1-288ページをご確認ください。 (3)水平可搬質量は外付けガイドを併用しロッドに進行方向以外からの外力がかからない場合の数値です。 (4)モータービルドイン仕様にはブレーキの設定がありませんのでご注意ください。 (5)簡易アブソで使用される場合も型式項目のエンコーダー種類欄は「 I 」になります。 (6)取付姿勢によっては注意が必要です。詳細は1-199ページをご参照ください。 (7)RCON接続時は、変換ユニットもしくは変換ケーブルが必要になります。詳細は7-25ページをご参照ください。 |
寸法図

ST:ストローク
ME:メカニカルエンド
SE:ストロークエンド
※1 モーター・エンコーダーケーブルを接続します。ケーブルの詳細は1-103ページをご参照ください。
※2 原点復帰を行った場合はロッドがMEまで移動しますので周囲物との干渉にご注意ください。
※3 二面幅の向きは製品によって異なります。
(注) ロッドにはロッドの進行方向以外からの外力をかけないでください。ロッドに対して直角方向や回転方向の力がかかるとまわり止めが破損する場合があります。
(注) RCA-RA3Dタイプにはブレーキの設定がありません。
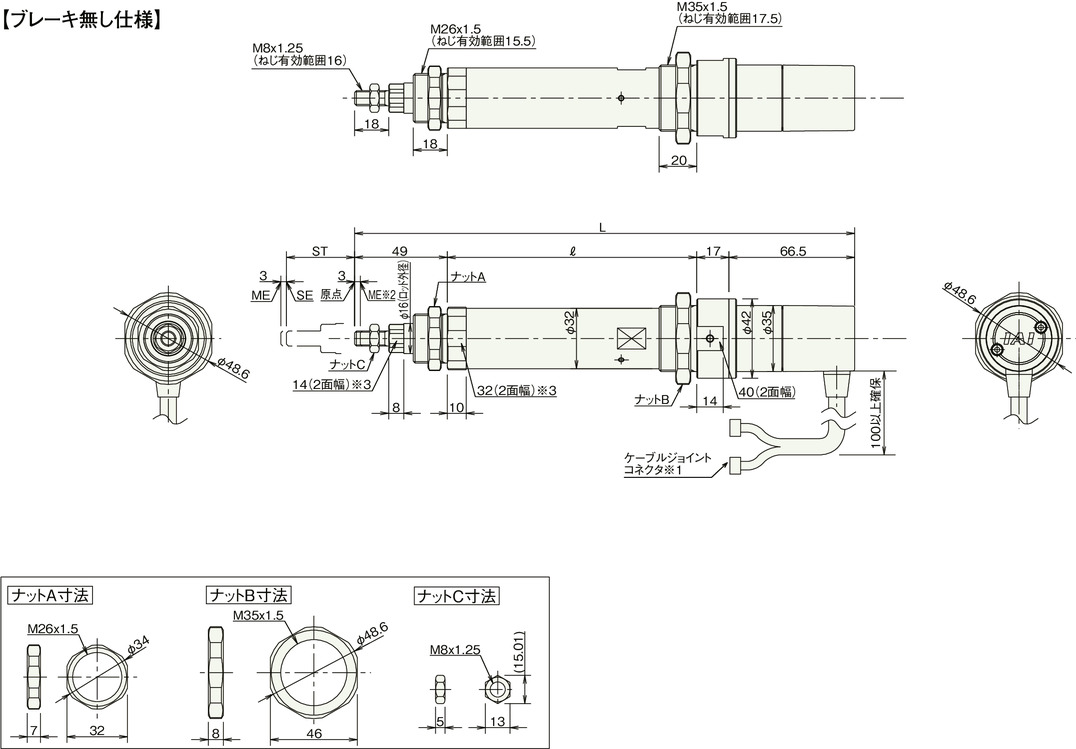
RCA-RA3D(ブレーキ無し)
| ストローク | 50 | 100 | 150 | 200 |
|---|---|---|---|---|
| L | 264.5 | 314.5 | 364.5 | 414.5 |
| ℓ | 132 | 182 | 232 | 282 |
| 質量(kg) | 0.7 | 0.8 | 0.9 | 1.0 |