製品の特長




取付姿勢




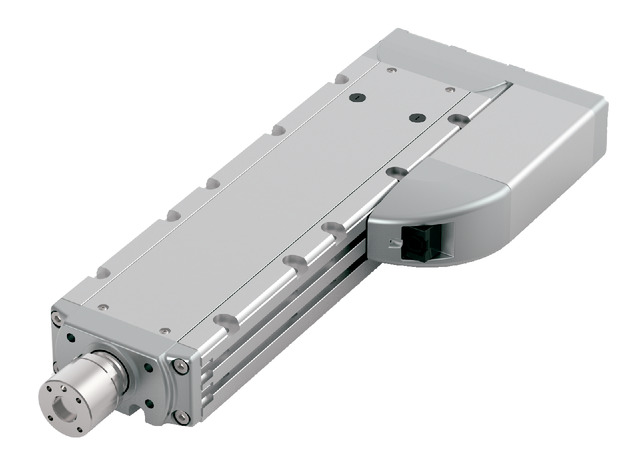
(注) 上写真はモーター左折返し仕様(ML)です。
メインスペック
| 項目 | 内容 | |||||
|---|---|---|---|---|---|---|
| リード | ボールねじリード(mm) | 24 | 16 | 8 | 4 | |
| 水平 | 可搬質量(注3) | 最大可搬質量(kg)(高出力有効) | 25 | 50 | 65 | 85 |
| 最大可搬質量(kg)(高出力無効) | 18 | 37 | 45 | 57 | ||
| 速度/加減速度 | 最高速度(mm/s) | 630 | 560 | 350 | 175 | |
| 最低速度(mm/s) | 30 | 20 | 10 | 5 | ||
| 定格加減速度(G) | 0.1 | 0.3 | 0.3 | 0.1 | ||
| 最高加減速度(G) | 1 | 1 | 1 | 1 | ||
| 垂直 | 可搬質量 | 最大可搬質量(kg)(高出力有効) | - | - | 15 | 25 |
| 最大可搬質量(kg)(高出力無効) | - | - | 12 | 18 | ||
| 速度/加減速度 | 最高速度(mm/s) | - | - | 210 | 130 | |
| 最低速度(mm/s) | - | - | 10 | 5 | ||
| 定格加減速度(G) | - | - | 0.5 | 0.1 | ||
| 最高加減速度(G) | - | - | 0.5 | 0.5 | ||
| 押付け | 押付け時最大推力(N) | 182 | 273 | 547 | 1094 | |
| 押付け最高速度(mm/s) | 20 | 20 | 20 | 20 | ||
| ブレーキ | ブレーキ仕様 | 無励磁作動電磁ブレーキ | ||||
| ブレーキ保持力(kgf) | - | - | 15 | 25 | ||
| ストローク | 最小ストローク(mm) | 50 | 50 | 50 | 50 | |
| 最大ストローク(mm) | 600 | 600 | 600 | 600 | ||
| ストロークピッチ(mm) | 50 | 50 | 50 | 50 | ||
(注3) ラジアル荷重を外付けガイドで受けた場合です。
| 項目 | 内容 |
|---|---|
| 駆動方式 | ボールねじ φ12mm 転造C10 |
| 繰返し位置決め精度 | ±0.01mm |
| ロストモーション | 0.1mm以下 |
| リニアガイド | 直動無限循環型 |
| ロッド | φ40mm 材質:ステンレス |
| ロッド不回転精度(注4) | 0度 |
| 使用周囲温度・湿度 | 0~40℃、85%RH以下(結露なきこと) |
| 保護等級 | IP30 |
| 耐振動・耐衝撃 | 4.9m/s2 |
| 海外対応規格 | CEマーク、RoHS指令 |
| モーター種類 | パルスモーター |
| エンコーダー種類 | バッテリーレスアブソリュート |
| エンコーダーパルス数 | 8192 pulse/rev |
| 納期 | ホームページ[納期照会]に記載 |
(注4) 無負荷時のロッド回転方向変位角です。
ストロークと最高速度
(単位はmm/s)
| リード (mm) | 接続 コントローラー | 50~600 (50mmごと) |
|---|---|---|
| 24 | 高出力有効 | 630 |
| 高出力無効 | 420 | |
| 16 | 高出力有効 | 560 |
| 高出力無効 | 420 | |
| 8 | 高出力有効 | 350<210> |
| 高出力無効 | 210<140> | |
| 4 | 高出力有効 | 175<130> |
| 高出力無効 | 105 |
(注) < >内は垂直使用の場合です。
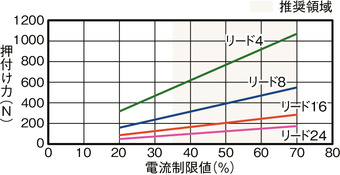
押付け力と電流制限値の相関図
速度・加速度別可搬質量表 ※出荷時は高出力設定有効です。詳細は1-23ページをご参照ください。
高出力設定有効(パワーモード) 搬送質量により最高速度は変動します。可搬質量の単位はkgです。空欄は動作不可となります。
| 姿勢 | 水平 | ||||
|---|---|---|---|---|---|
| 速度 | 加速度(G) | ||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 |
| 0 | 25 | 22 | 14 | 12 | 8 |
| 210 | 25 | 22 | 14 | 12 | 8 |
| 420 | 25 | 18 | 14 | 6 | 3 |
| 630 | 8 | 2 | |||
| 姿勢 | 水平 | ||||
|---|---|---|---|---|---|
| 速度 | 加速度(G) | ||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 |
| 0 | 50 | 50 | 40 | 35 | 30 |
| 140 | 50 | 50 | 40 | 35 | 30 |
| 280 | 50 | 46 | 31 | 22 | 18 |
| 420 | 50 | 22 | 12 | 8 | 6 |
| 560 | 10 | 2 | |||
| 姿勢 | 水平 | 垂直 | ||||||
|---|---|---|---|---|---|---|---|---|
| 速度 | 加速度(G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 65 | 65 | 55 | 50 | 45 | 15 | 15 | 15 |
| 70 | 65 | 65 | 55 | 50 | 45 | 15 | 15 | 15 |
| 140 | 65 | 65 | 55 | 50 | 45 | 13 | 13 | 10 |
| 210 | 65 | 65 | 40 | 30 | 23 | 5 | 5 | 4 |
| 280 | 65 | 25 | 13 | 7 | 3 | |||
| 350 | 35 | |||||||
| 姿勢 | 水平 | 垂直 | ||||||
|---|---|---|---|---|---|---|---|---|
| 速度 | 加速度(G) | |||||||
| (mm/s) | 0.1 | 0.3 | 0.5 | 0.7 | 1 | 0.1 | 0.3 | 0.5 |
| 0 | 85 | 80 | 70 | 65 | 60 | 25 | 23 | 23 |
| 35 | 85 | 80 | 70 | 65 | 60 | 25 | 23 | 23 |
| 70 | 85 | 80 | 70 | 65 | 60 | 25 | 23 | 23 |
| 105 | 85 | 80 | 60 | 50 | 40 | 19 | 17 | 17 |
| 130 | 85 | 50 | 10 | 6 | 6 | 7 | 4 | |
| 175 | 45 | |||||||
高出力設定無効(省エネモード) 搬送質量により最高速度は変動します。可搬質量の単位はkgです。空欄は動作不可となります。
| 姿勢 | 水平 | |
|---|---|---|
| 速度 | 加速度(G) | |
| (mm/s) | 0.3 | 0.7 |
| 0 | 18 | 9.5 |
| 210 | 18 | 9.5 |
| 420 | 8 | 3 |
| 姿勢 | 水平 | |
|---|---|---|
| 速度 | 加速度(G) | |
| (mm/s) | 0.3 | 0.7 |
| 0 | 37 | 27 |
| 140 | 37 | 27 |
| 280 | 18 | 13 |
| 420 | 3.5 | |
| 姿勢 | 水平 | 垂直 | |
|---|---|---|---|
| 速度 | 加速度(G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 45 | 33 | 12 |
| 70 | 45 | 33 | 12 |
| 140 | 45 | 27 | 6 |
| 210 | 12 | 4.5 | |
| 姿勢 | 水平 | 垂直 | |
|---|---|---|---|
| 速度 | 加速度(G) | ||
| (mm/s) | 0.3 | 0.7 | 0.3 |
| 0 | 57 | 48 | 18 |
| 35 | 57 | 48 | 18 |
| 70 | 57 | 48 | 13.5 |
| 105 | 12 | 7.5 | 1 |
適応コントローラー
本ページのアクチュエーターは下記のコントローラーで動作が可能です。ご使用になる用途に応じたタイプをご選択ください。
| 名称 | 外観 | 最大接続 可能軸数 | 電源電圧 | 制御方法 | 最大位置決め点数 | |||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ポジショナー | パルス列 | プログラム | ネットワーク ※選択 | |||||||||||||||||
| DV | CC | CIE | CIT | PR | CN | ML | ML3 | EC | EP | PRT | SSN | ECM | ||||||||
| MSEL-PC/PG |  | 4 | 単相AC 100~230V | - | - | ● | ● | ● | - | - | ● | - | - | - | ● | ● | ● | - | - | 30000 |
| PCON-CB/CGB |  | 1 | DC24V | ● ※選択 | ● ※選択 | - | ● | ● | ● | - | ● | ● | ● | ● | ● | ● | ● | - | - | 512 (ネットワーク仕様は768) |
| PCON-CYB/PLB/POB |  | 1 | ● ※選択 | ● ※選択 | - | - | - | - | - | - | - | - | - | - | - | - | - | - | 64 | |
| RCON |  | 16 (ML3,SSN,ECMは8) | - | - | - | ● | ● | ● | ● | ● | - | - | ● | ● | ● | ● | ● | ● | 128 (ML3,SSN,ECMはポジションデータなし) | |
| RSEL | 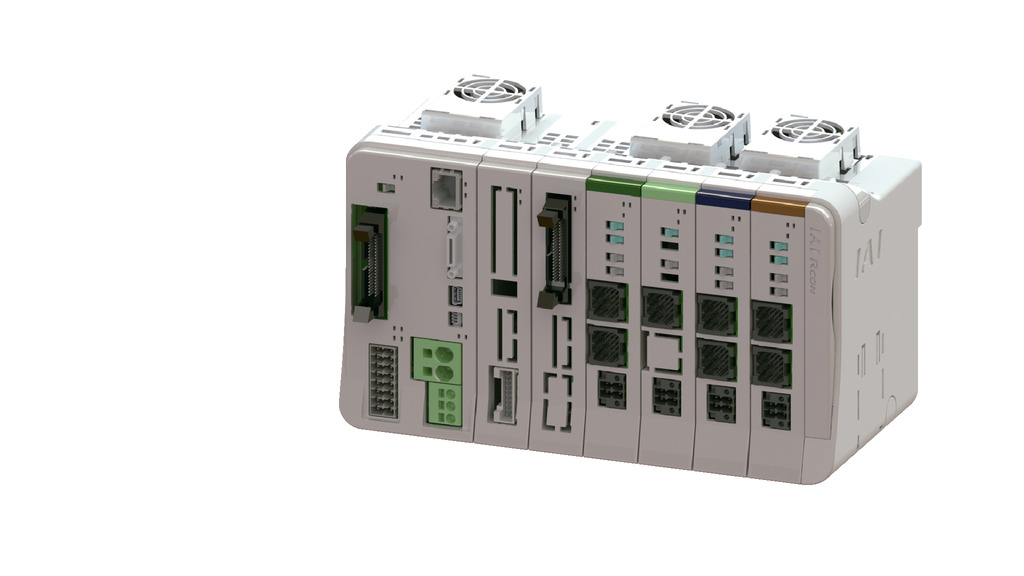 | 8 | - | - | ● | ● | ● | ● | - | ● | - | - | - | ● | ● | ● | - | - | 36000 | |
(注) DV、CCなどのネットワーク略称記号については、8-15ページをご確認ください。
(注) RCP6Sシリーズの内蔵コントローラーは、8-181ページをご確認ください。
海外規格


選定上の注意
| (1)「メインスペック」の可搬質量は、最大値を表示しています。詳細は「速度・加速度別可搬質量表」をご参照ください。 (2)ラジアルシリンダーはガイドを内蔵しています。許容可能な負荷質量については「ロッド先端許容負荷質量」をご参照ください。 (3)押付け動作を行う場合は「押付け力と電流制限値の相関図」をご参照ください。押付け力は目安の値です。注意点は1-321ページをご確認ください。 (4)RCP6S(コントローラー内蔵)のリード4/8/16は、使用周囲温度によって、デューティー比の制限が必要です。詳細は1-335ページをご参照ください。 (5)取付け姿勢によっては注意が必要です。詳細は1-313ページをご参照ください。 (6)リード16、24は垂直で設置することはできません。 |
寸法図

RCP6-WRA14R
ST:ストローク
M.E.:メカニカルエンド
S.E.:ストロークエンド
(注) 原点復帰を行った場合はロッドがM.E.まで移動しますので、周囲物との干渉にご注意ください。
(注) 先端フランジリーマー穴はロッド中心に対して±1゜の角度のずれ量があります。搬送物の張出しが大きい場合や厳密な角度調整が必要な場合は、リーマー穴を使用せずに搬送物を取付けてください。
(注) 下図はモーター左折返し仕様(ML)の場合です。
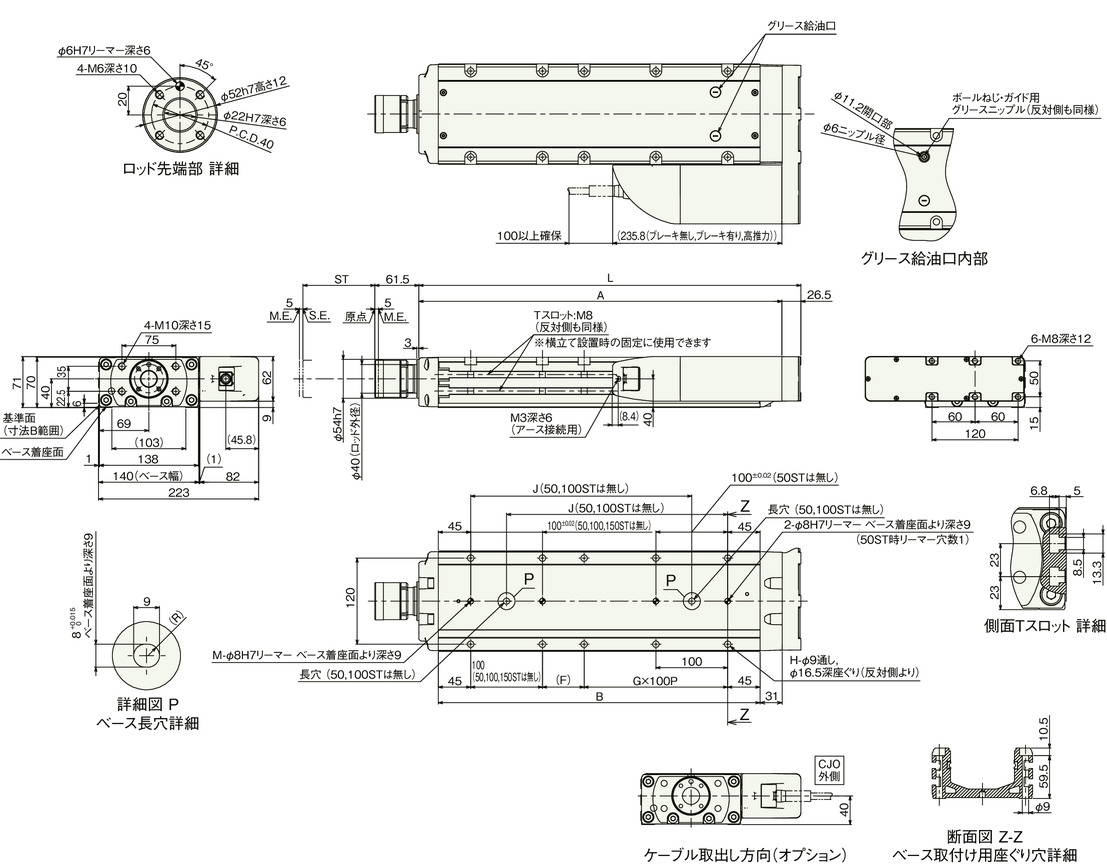
ストローク別寸法
| ストローク | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| L | 282 | 332 | 382 | 432 | 482 | 532 | 582 | 632 | 682 | 732 | 782 | 832 | ||
| A | 256 | 306 | 356 | 406 | 456 | 506 | 556 | 606 | 656 | 706 | 756 | 806 | ||
| B | 198 | 248 | 298 | 348 | 398 | 448 | 498 | 548 | 598 | 648 | 698 | 748 | ||
| F | 108 | 58 | 108 | 58 | 108 | 58 | 108 | 58 | 108 | 58 | 108 | 58 | ||
| G | 0 | 1 | 1 | 1 | 1 | 2 | 2 | 3 | 3 | 4 | 4 | 5 | ||
| H | 4 | 6 | 6 | 8 | 8 | 10 | 10 | 12 | 12 | 14 | 14 | 16 | ||
| J | - | - | 158 | 208 | 258 | 308 | 358 | 408 | 458 | 508 | 558 | 608 | ||
| M | 1 | 1 | 1 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | 2 | ||
| ロッド先端静的許容荷重(N) | 454 | 392 | 345 | 307 | 276 | 251 | 229 | 210 | 193 | 179 | 166 | 154 | ||
| ロッド先端静的許容トルク(N・m) | 30 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | 30 | ||
| 3000km寿命 | ロッド先端動的許容荷重(N) | オフセット0mm | 199 | 170 | 148 | 131 | 117 | 104 | 94 | 85 | 77 | 70 | 64 | 58 |
| オフセット150mm | 100 | 100 | 100 | 100 | 100 | 95 | 87 | 79 | 72 | 66 | 60 | 55 | ||
| ロッド先端動的許容トルク(N・m) | 15.0 | 15.0 | 15.0 | 15.0 | 15.0 | 14.3 | 13.0 | 11.8 | 10.8 | 9.9 | 9.0 | 8.2 | ||
| 5000km寿命 | ロッド先端動的許容荷重(N) | オフセット0mm | 167 | 143 | 124 | 109 | 97 | 87 | 78 | 70 | 63 | 57 | 51 | 46 |
| オフセット150mm | 100 | 100 | 100 | 96 | 87 | 79 | 71 | 65 | 59 | 53 | 48 | 44 | ||
| ロッド先端動的許容トルク(N・m) | 15.0 | 15.0 | 15.0 | 14.4 | 13.0 | 11.8 | 10.7 | 9.7 | 8.8 | 8.0 | 7.3 | 6.6 | ||
ストローク別質量
| ストローク | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 | 550 | 600 | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 質量 (kg) | RCP6 | ブレーキ無し | 8.7 | 9.6 | 10.5 | 11.4 | 12.2 | 13.1 | 14.0 | 14.9 | 15.7 | 16.6 | 17.5 | 18.4 |
| ブレーキ有り | 8.9 | 9.7 | 10.6 | 11.5 | 12.4 | 13.2 | 14.1 | 15.0 | 15.9 | 16.7 | 17.6 | 18.5 | ||
| RCP6S | ブレーキ無し | 8.9 | 9.8 | 10.7 | 11.5 | 12.4 | 13.3 | 14.2 | 15.0 | 15.9 | 16.8 | 17.7 | 18.5 | |
| ブレーキ有り | 9.0 | 9.9 | 10.8 | 11.6 | 12.5 | 13.4 | 14.3 | 15.2 | 16.0 | 16.9 | 17.8 | 18.7 | ||
RCP6S-WRA14R
ST:ストローク
M.E.:メカニカルエンド
S.E.:ストロークエンド
(注) 原点復帰を行った場合はロッドがM.E.まで移動しますので、周囲物との干渉にご注意ください。
(注) 先端フランジリーマー穴はロッド中心に対して±1゜の角度のずれ量があります。搬送物の張出しが大きい場合や厳密な角度調整が必要な場合は、リーマー穴を使用せずに搬送物を取付けてください。
(注) 下図はモーター左折返し仕様(ML)の場合です。
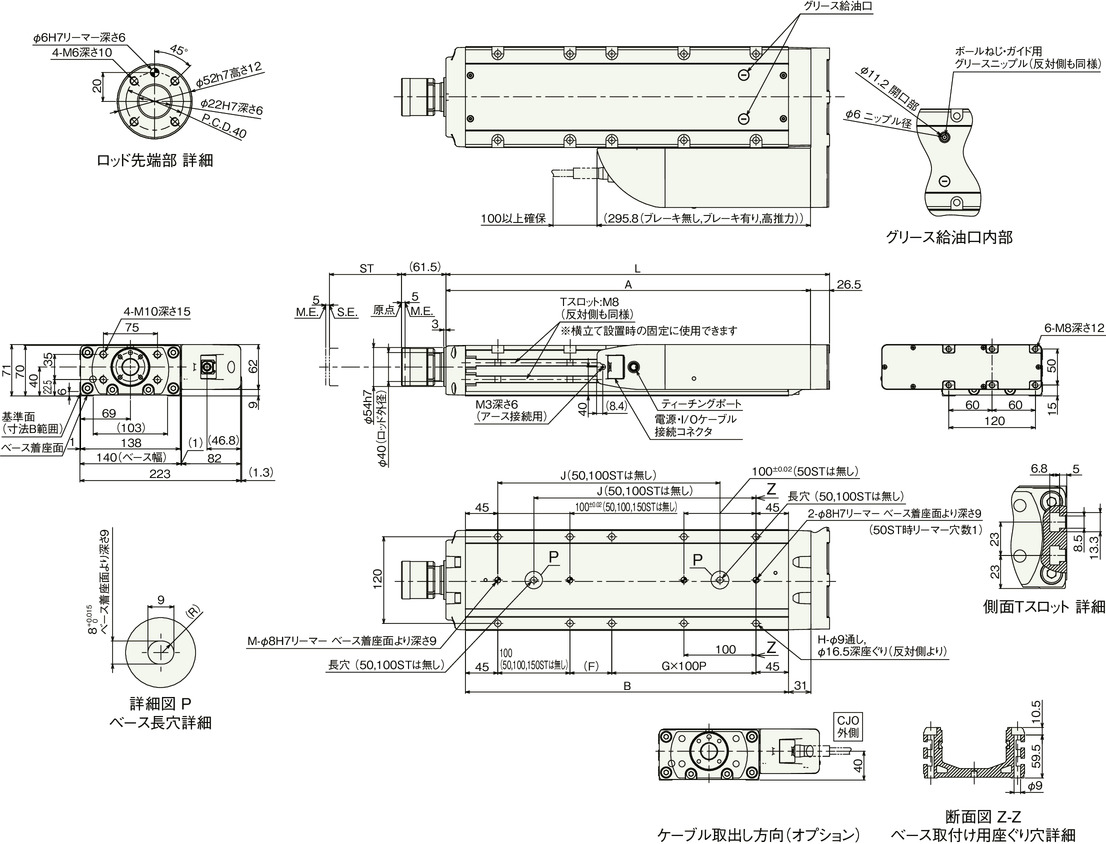
(注) RCP6Sのストローク別寸法・質量は、前ページをご参照ください。
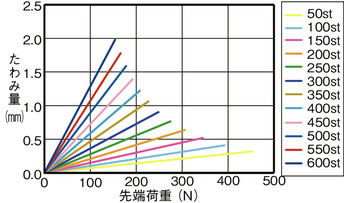
ロッドたわみ量(参考値)
ロッド先端許容負荷質量

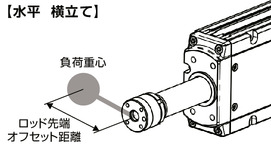
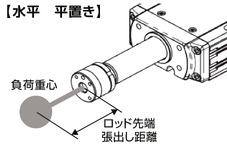
水平
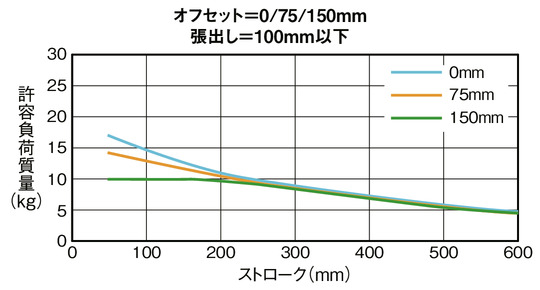
許容負荷質量の算出の条件
加減速によるモーメントを考慮した、
ガイド走行寿命5000kmとなる負荷質量。
(加速度1G、速度500mm/s)
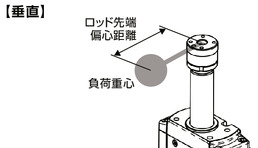
垂直
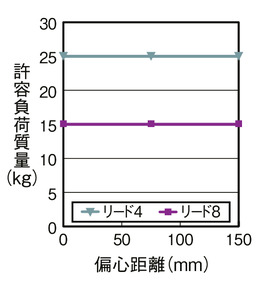
許容負荷質量の算出の条件
加減速によるモーメントを考慮した、
ガイド走行寿命5000kmとなる負荷質量。
(加速度0.5G、速度210mm/s)
