







メインスペック
| 項目 | 内容 | |||||
|---|---|---|---|---|---|---|
| リード | ボールねじリード(mm) | 16 | 10 | 5 | 2.5 | |
| 水平 | 可搬質量 | 最大可搬質量(kg)(省電力無効) | 6.5 | 16 | 20 | 20 |
| 最大可搬質量(kg)(省電力有効) | 6.5 | 15 | 20 | 20 | ||
| 速度/加減速度 | 最高速度(mm/s) | 700 | 525 | 300 | 135 | |
| 最低速度(mm/s) | 40 | 30 | 7 | 4 | ||
| 定格加減速度(G) | 0.3 | 0.3 | 0.3 | 0.3 | ||
| 最高加減速度(G) | 1 | 1 | 0.5 | 0.3 | ||
| 垂直 | 可搬質量 | 最大可搬質量(kg)(省電力無効) | 1.5 | 2.5 | 5 | 6.5 |
| 最大可搬質量(kg)(省電力有効) | 1 | 2.5 | 5 | 6.5 | ||
| 速度/加減速度 | 最高速度(mm/s) | 560 | 435 | 260 | 135 | |
| 最低速度(mm/s) | 40 | 30 | 7 | 4 | ||
| 定格加減速度(G) | 0.3 | 0.3 | 0.3 | 0.3 | ||
| 最高加減速度(G) | 0.5 | 0.5 | 0.5 | 0.3 | ||
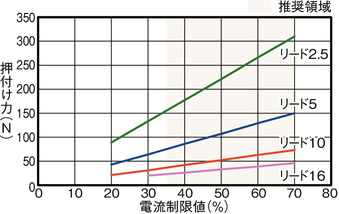
| 押付け | 押付け時最大推力(N) | 46 | 73 | 150 | 310 | |
| 押付け最高速度(mm/s) | 40 | 30 | 20 | 20 | ||
| ブレーキ | ブレーキ仕様 | 無励磁作動電磁ブレーキ | ||||
| ブレーキ保持力(kgf) | 1.5 | 2.5 | 5 | 6.5 | ||
| ストローク | 最小ストローク(mm) | 50 | 50 | 50 | 50 | |
| 最大ストローク(mm) | 150 | 150 | 150 | 150 | ||
| ストロークピッチ(mm) | 50 | 50 | 50 | 50 | ||
| 項目 | 内容 |
|---|---|
| 駆動方式 | ボールねじ φ8mm 転造C10 |
| 繰返し位置決め精度 | ±0.02mm |
| ロストモーション | 0.1mm |
| 静的許容モーメント | Ma : 32.3 N・m |
| Mb : 23.5 N・m | |
| Mc : 45.0 N・m | |
| 動的許容モーメント (注6) | Ma : 11.6 N・m |
| Mb : 16.6 N・m | |
| Mc : 34.0 N・m | |
| 走行寿命 | 5000km |
| 使用周囲温度・湿度 | 0~40℃、85%RH以下(結露なきこと) |
| 保護等級 | - |
| 耐振動・耐衝撃 | 4.9m/s2 |
| 海外対応規格 | CEマーク、RoHS指令、UL規格 |
| モーター種類 | パルスモーター(□35) (電源容量:最大4.2A) |
| エンコーダー種類 | インクリメンタル/バッテリーレスアブソリュート |
| エンコーダーパルス数 | 800 pulse/rev |
| 納期 | ホームページ[納期照会]に記載 |
(注6) 基準定格寿命5,000kmの場合です。走行寿命は運転条件、取付け状態によって異なります。1-280ページにて走行寿命をご確認ください。
テーブルタイプモーメント方向

速度・加速度別可搬質量表 ※出荷時は省電力設定無効です。詳細は1-23ページをご参照ください。
省電力設定無効(パワーモード) 可搬質量の単位はkgです。空欄は動作不可となります。
| 姿勢 | 水平 | 垂直 | ||||
|---|---|---|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 6.5 | 4 | 3 | 2 | 1.5 | 1.5 |
| 140 | 6.5 | 4 | 3 | 2 | 1.5 | 1.5 |
| 280 | 6.5 | 4 | 3 | 2 | 1.5 | 1.5 |
| 420 | 1.5 | |||||
| 姿勢 | 水平 | 垂直 | ||||
|---|---|---|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 16 | 11 | 7 | 4.5 | 2.5 | 2 |
| 175 | 16 | 11 | 7 | 4.5 | 2.5 | 2 |
| 350 | 12.5 | 7 | 4 | 2.5 | 2.5 | 2 |
| 435 | 0.5 | |||||
| 姿勢 | 水平 | 垂直 | ||
|---|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | |||
| 0.3 | 0.5 | 0.3 | 0.5 | |
| 0 | 20 | 20 | 5 | 4.5 |
| 85 | 20 | 20 | 5 | 4.5 |
| 130 | 20 | 17.5 | 5 | 4.5 |
| 215 | 20 | 13 | 4 | 4 |
| 260 | 7 | 6.5 | 1 | 1 |
| 300 | 1 | |||
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 (mm/s) | 加速度(G) | |
| 0.3 | 0.3 | |
| 0 | 20 | 6.5 |
| 40 | 20 | 6.5 |
| 85 | 20 | 6.5 |
| 105 | 20 | 6.5 |
| 135 | 18 | 1.5 |
| 姿勢 | 水平 | 垂直 | ||||
|---|---|---|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 6.5 | 4 | 3 | 2 | 1.5 | 1.5 |
| 140 | 6.5 | 4 | 3 | 2 | 1.5 | 1.5 |
| 280 | 6.5 | 4 | 3 | 2 | 1.5 | 1.5 |
| 420 | 6.5 | 4 | 2.5 | 1.5 | 1.5 | 1.5 |
| 560 | 3 | 2 | 1 | 0.5 | ||
| 700 | 0.5 | |||||
| 姿勢 | 水平 | 垂直 | ||||
|---|---|---|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 15.5 | 11 | 7 | 4.5 | 2.5 | 2 |
| 175 | 15.5 | 11 | 7 | 4.5 | 2.5 | 2 |
| 350 | 12.5 | 7 | 4 | 2.5 | 2.5 | 2 |
| 435 | 9.5 | 5 | 3 | 0.5 | 1 | 1 |
| 525 | 2 | 1 | ||||
| 姿勢 | 水平 | 垂直 | ||
|---|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | |||
| 0.3 | 0.5 | 0.3 | 0.5 | |
| 0 | 15.5 | 15.5 | 5 | 4.5 |
| 85 | 15.5 | 15.5 | 5 | 4.5 |
| 130 | 15.5 | 15.5 | 5 | 4.5 |
| 215 | 15.5 | 13 | 4 | 4 |
| 260 | 7 | 6.5 | 1 | 1 |
| 300 | 1 | |||
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 (mm/s) | 加速度(G) | |
| 0.3 | 0.3 | |
| 0 | 15.5 | 6.5 |
| 40 | 15.5 | 6.5 |
| 85 | 15.5 | 6.5 |
| 105 | 15.5 | 6.5 |
| 135 | 15.5 | 1.5 |
| 姿勢 | 水平 | 垂直 | ||||
|---|---|---|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 6.5 | 4 | 3 | 2 | 1.5 | 1.5 |
| 140 | 6.5 | 4 | 3 | 2 | 1.5 | 1.5 |
| 280 | 6.5 | 4 | 3 | 2 | 1.5 | 1.5 |
| 420 | 6.5 | 4 | 2.5 | 1.5 | 1.5 | 1.5 |
| 560 | 5 | 3 | 2 | 1 | 0.5 | 0.5 |
| 700 | 1.5 | 1 | 0.5 | |||
| 姿勢 | 水平 | 垂直 | ||||
|---|---|---|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | |||||
| 0.3 | 0.5 | 0.7 | 1 | 0.3 | 0.5 | |
| 0 | 10 | 10 | 7 | 4.5 | 2.5 | 2 |
| 175 | 10 | 10 | 7 | 4.5 | 2.5 | 2 |
| 350 | 10 | 7 | 4 | 2.5 | 2.5 | 2 |
| 435 | 9.5 | 5 | 3 | 0.5 | 1 | 1 |
| 525 | 4.5 | 2 | 1 | |||
| 姿勢 | 水平 | 垂直 | ||
|---|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | |||
| 0.3 | 0.5 | 0.3 | 0.5 | |
| 0 | 10 | 10 | 5 | 4.5 |
| 85 | 10 | 10 | 5 | 4.5 |
| 130 | 10 | 10 | 5 | 4.5 |
| 215 | 10 | 10 | 4 | 4 |
| 260 | 7 | 6.5 | 1 | 1 |
| 300 | 1 | |||
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 (mm/s) | 加速度(G) | |
| 0.3 | 0.3 | |
| 0 | 10 | 6.5 |
| 40 | 10 | 6.5 |
| 85 | 10 | 6.5 |
| 105 | 10 | 6.5 |
| 135 | 10 | 1.5 |
省電力設定有効(省エネモード) 可搬質量の単位はkgです。空欄は動作不可となります。
| 姿勢 | 水平 | 垂直 | |
|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 6.5 | 2.5 | 1 |
| 140 | 6.5 | 2.5 | 1 |
| 280 | 5.5 | 2 | 1 |
| 姿勢 | 水平 | 垂直 | |
|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 15 | 5.5 | 2.5 |
| 175 | 15 | 5.5 | 2.5 |
| 350 | 5 | 2 | 0.5 |
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 (mm/s) | 加速度(G) | |
| 0.3 | 0.3 | |
| 0 | 20 | 5 |
| 85 | 20 | 5 |
| 130 | 20 | 5 |
| 215 | 4.5 | |
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 (mm/s) | 加速度(G) | |
| 0.3 | 0.3 | |
| 0 | 20 | 6.5 |
| 40 | 20 | 6.5 |
| 85 | 20 | 4.5 |
| 105 | 18 | 1 |
| 姿勢 | 水平 | 垂直 | |
|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 6.5 | 2.5 | 1 |
| 140 | 6.5 | 2.5 | 1 |
| 280 | 5.5 | 2 | 1 |
| 420 | 4 | 1 | 0.5 |
| 姿勢 | 水平 | 垂直 | |
|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 15 | 5.5 | 2.5 |
| 175 | 15 | 5.5 | 2.5 |
| 350 | 5 | 2 | 0.5 |
| 435 | 0.5 | ||
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 (mm/s) | 加速度(G) | |
| 0.3 | 0.3 | |
| 0 | 15.5 | 5 |
| 85 | 15.5 | 5 |
| 130 | 15.5 | 5 |
| 215 | 4.5 | |
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 (mm/s) | 加速度(G) | |
| 0.3 | 0.3 | |
| 0 | 15.5 | 6.5 |
| 40 | 15.5 | 6.5 |
| 85 | 15.5 | 4.5 |
| 105 | 15.5 | 1 |
| 姿勢 | 水平 | 垂直 | |
|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 6.5 | 2.5 | 1 |
| 140 | 6.5 | 2.5 | 1 |
| 280 | 5.5 | 2 | 1 |
| 420 | 4 | 1 | 0.5 |
| 560 | 2 | 0.5 | |
| 姿勢 | 水平 | 垂直 | |
|---|---|---|---|
| 速度 (mm/s) | 加速度(G) | ||
| 0.3 | 0.7 | 0.3 | |
| 0 | 10 | 5.5 | 2.5 |
| 175 | 10 | 5.5 | 2.5 |
| 350 | 5 | 2 | 0.5 |
| 435 | 0.5 | ||
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 (mm/s) | 加速度(G) | |
| 0.3 | 0.3 | |
| 0 | 10 | 5 |
| 85 | 10 | 5 |
| 130 | 10 | 5 |
| 215 | 4.5 | |
| 姿勢 | 水平 | 垂直 |
|---|---|---|
| 速度 (mm/s) | 加速度(G) | |
| 0.3 | 0.3 | |
| 0 | 10 | 6.5 |
| 40 | 10 | 6.5 |
| 85 | 10 | 4.5 |
| 105 | 10 | 1 |
ストロークと最高速度
(単位はmm/s)
| リード (mm) | 省電力設定 | 50 (mm) | 100 (mm) | 150 (mm) |
|---|---|---|---|---|
| 16 | 無効 | 420<280> | 700<560> | |
| 有効 | 280 | 420 | 560<420> | |
| 10 | 無効 | 435<350> | 525<435> | |
| 有効 | 350 | 435<350> | ||
| 5 | 無効 | 300<260> | ||
| 有効 | 215<130> | |||
| 2.5 | 無効 | 135 | ||
| 有効 | 105 | |||
(注) <>内は垂直使用の場合です。
押付け力と電流制限値の相関図
適応コントローラー
(注) ECシリーズはコントローラー内蔵です。内蔵コントローラーの詳細は、2-845ページをご確認ください。
海外規格



選定上の注意
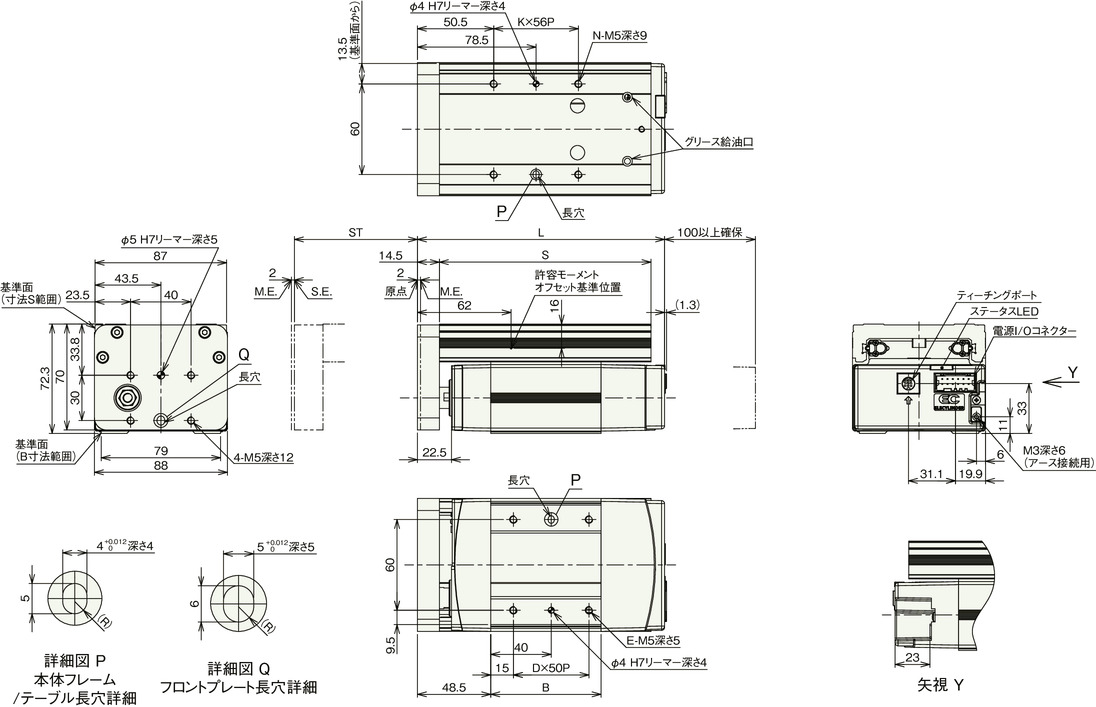
寸法図

ST:ストローク
M.E.:メカニカルエンド
S.E.:ストロークエンド
(注) 原点復帰を行った場合は、ロッドがM.E.まで移動しますので周囲との干渉にご注意ください。
(注) 取付けボルト長にご注意ください。ボルトが長いと内部部品に干渉し、摺動異常や部品破損の可能性があります。
ストローク別寸法
| エンコーダー種類 | インクリメンタル | バッテリーレスアブソリュート | |||||
|---|---|---|---|---|---|---|---|
| ストローク | 50 | 100 | 150 | 50 | 100 | 150 | |
| L | ブレーキ無し | 163.5 | 213.5 | 263.5 | 188.5 | 213.5 | 263.5 |
| ブレーキ有り | 213.5 | 213.5 | 263.5 | 226.5 | 226.5 | 263.5 | |
| B | ブレーキ無し | 73 | 123 | 173 | 98 | 123 | 173 |
| ブレーキ有り | 123 | 123 | 173 | 136 | 136 | 173 | |
| D | ブレーキ無し | 1 | 2 | 3 | 1 | 2 | 3 |
| ブレーキ有り | 2 | 2 | 3 | 2 | 2 | 3 | |
| E | ブレーキ無し | 4 | 6 | 8 | 4 | 6 | 8 |
| ブレーキ有り | 6 | 6 | 8 | 6 | 6 | 8 | |
| K | ブレーキ無し | 1 | 2 | 3 | 1 | 2 | 3 |
| ブレーキ有り | 1 | 2 | 3 | 1 | 2 | 3 | |
| N | ブレーキ無し | 4 | 6 | 8 | 4 | 6 | 8 |
| ブレーキ有り | 4 | 6 | 8 | 4 | 6 | 8 | |
| S | ブレーキ無し | 140 | 190 | 240 | 140 | 190 | 240 |
| ブレーキ有り | 140 | 190 | 240 | 140 | 190 | 240 | |
ストローク別質量
| エンコーダー種類 | インクリメンタル | バッテリーレスアブソリュート | |||||
|---|---|---|---|---|---|---|---|
| ストローク | 50 | 100 | 150 | 50 | 100 | 150 | |
| 質量 (kg) | ブレーキ無し | 1.7 | 2.2 | 2.6 | 1.9 | 2.2 | 2.6 |
| ブレーキ有り | 2.2 | 2.4 | 2.8 | 2.3 | 2.5 | 2.8 | |